Get live statistics and analysis of Ted Xiao's profile on X / Twitter
Founding Member of Technical Staff at Project Prometheus. Previously Gemini, Robotics @GoogleDeepMind. Posts about frontier models, physical AGI, and scaling.
781following25kfollowers
The Visionary
Ted Xiao is a frontier-ML and robotics leader who helped bring vision-language-action models into the physical world. A founding member of the Technical Staff at Project Prometheus and an ex-DeepMind robotics researcher, he tweets about frontier models, physical AGI, and scaling with a mix of technical depth and big-picture optimism. His threads spark conversation across research and industry.
You tweet like someone who simultaneously builds the future and writes its changelog, impressive, until you realize your TL;DR is a 2,000-word elegy and half of us are still on the 'what is a VLA?' tutorial.
Helped transform general-purpose robot learning from a fringe idea into a normalized roadmap and played a leading role in Gemini Robotics’ leap to SOTA vision-language-action control, a milestone that visibly moved both the research community and public conversation.
To accelerate the safe, scalable emergence of embodied intelligence, turning frontier models into real-world robot capabilities that meaningfully improve how people interact with and benefit from physical AI. He aims to bridge rigorous scientific scaling with practical robot deployment so AGI understands and acts in the physical world.
Believes in ambitious moonshots grounded by rigorous evaluation, collaboration across industry and academia, and the power of scaled systems (pre-/mid-/post-training) to produce qualitatively new capabilities. Values curiosity, craft, open technical discussion, and shipping real-world impact over siloed theory.
Rare combo of deep technical chops, systems-level scaling intuition, and an ability to narrate far-future implications in accessible threads. Strong network inside top labs and credibility on both research and product fronts.
Techno-optimism can sometimes outpace nuance for broader audiences; very deep threads may intimidate non-specialists and occasionally invite heated debate. Also prone to chasing the next big moonshot, which can fragment attention.
1) Thread with TL;DR first: start each long technical thread with a 1, 2 line takeaway for casual readers. 2) Mix media: short demo clips of robots, diagrams, and succinct explainer videos increase shareability. 3) Break big papers into a 3, 5 tweet 'insights' series for non-experts and a follow-up deep-dive for peers. 4) Host occasional X Spaces or AMAs after major posts to convert impressions into followers and sustained engagement. 5) Use bilingual hooks (English + Chinese) when relevant to capitalize on observed model-language phenomena. 6) Pin a concise “why I left DeepMind / what I’m building” thread to convert curious visitors into long-term followers.
Fun fact: Ted’s ‘first contact’ thread about a frontier model controlling robots hit ~148k views and is emblematic of his reach, he has ~25,572 followers and ~1,767 tweets. He left Google DeepMind after 8 years, played a central role in Gemini Robotics, and often notices subtle phenomena (like models switching to Chinese mid-reasoning) that others miss.
Open X-Embodiment wins the Best Paper Award at #ICRA2024 🎉🤖!
An unprecedented Best Paper 170+ author list (most didn’t fit on the slide) may be a record for ICRA! So amazing to see what a collaborative community effort can accomplish in pushing robotics + AI forward 🚀
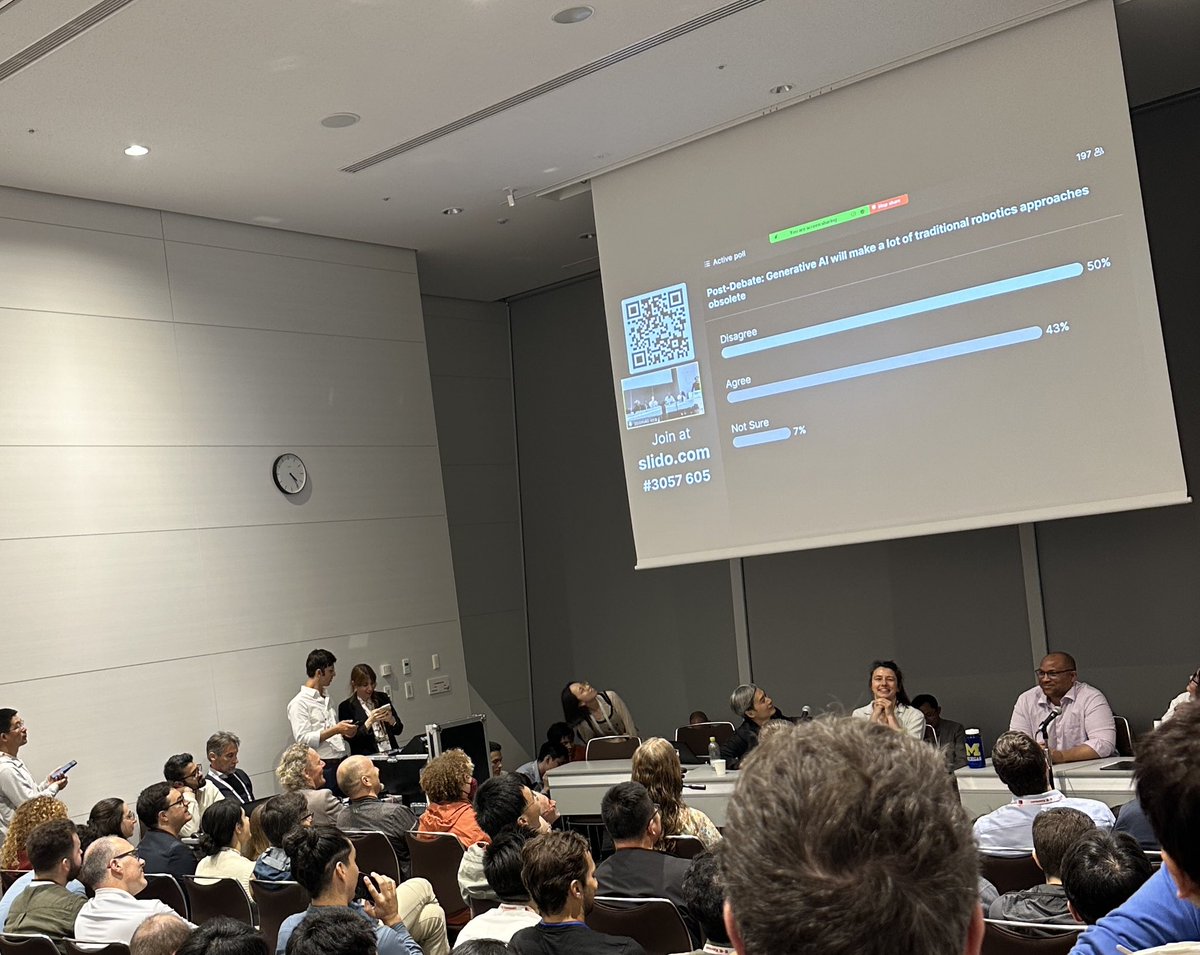
Great debate today at #ICRA2024 on “Generative AI will make a lot of traditional robotics approaches obsolete"!
But I suspect 57% of the room will be very shocked/unhappy over the next 5 years 🙃
{"data":{"__meta":{"device":false,"path":"/creators/xiao_ted"},"/creators/xiao_ted":{"data":{"user":{"id":"1976589691","name":"Ted Xiao","description":"Founding Member of Technical Staff at Project Prometheus. Previously Gemini, Robotics @GoogleDeepMind. Posts about frontier models, physical AGI, and scaling.","followers_count":25572,"friends_count":781,"statuses_count":1767,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1604438813149138952/ZFxh6pdd_normal.jpg","screen_name":"xiao_ted","location":"San Francisco","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"tedxiao.me","expanded_url":"http://tedxiao.me","indices":[0,23],"url":"https://t.co/a54M9YJio3"}]}}},"details":{"type":"The Visionary","description":"Ted Xiao is a frontier-ML and robotics leader who helped bring vision-language-action models into the physical world. A founding member of the Technical Staff at Project Prometheus and an ex-DeepMind robotics researcher, he tweets about frontier models, physical AGI, and scaling with a mix of technical depth and big-picture optimism. His threads spark conversation across research and industry.","purpose":"To accelerate the safe, scalable emergence of embodied intelligence—turning frontier models into real-world robot capabilities that meaningfully improve how people interact with and benefit from physical AI. He aims to bridge rigorous scientific scaling with practical robot deployment so AGI understands and acts in the physical world.","beliefs":"Believes in ambitious moonshots grounded by rigorous evaluation, collaboration across industry and academia, and the power of scaled systems (pre-/mid-/post-training) to produce qualitatively new capabilities. Values curiosity, craft, open technical discussion, and shipping real-world impact over siloed theory.","facts":"Fun fact: Ted’s ‘first contact’ thread about a frontier model controlling robots hit ~148k views and is emblematic of his reach — he has ~25,572 followers and ~1,767 tweets. He left Google DeepMind after 8 years, played a central role in Gemini Robotics, and often notices subtle phenomena (like models switching to Chinese mid-reasoning) that others miss.","strength":"Rare combo of deep technical chops, systems-level scaling intuition, and an ability to narrate far-future implications in accessible threads. Strong network inside top labs and credibility on both research and product fronts.","weakness":"Techno-optimism can sometimes outpace nuance for broader audiences; very deep threads may intimidate non-specialists and occasionally invite heated debate. Also prone to chasing the next big moonshot, which can fragment attention.","recommendation":"1) Thread with TL;DR first: start each long technical thread with a 1–2 line takeaway for casual readers. 2) Mix media: short demo clips of robots, diagrams, and succinct explainer videos increase shareability. 3) Break big papers into a 3–5 tweet 'insights' series for non-experts and a follow-up deep-dive for peers. 4) Host occasional X Spaces or AMAs after major posts to convert impressions into followers and sustained engagement. 5) Use bilingual hooks (English + Chinese) when relevant to capitalize on observed model-language phenomena. 6) Pin a concise “why I left DeepMind / what I’m building” thread to convert curious visitors into long-term followers.","roast":"You tweet like someone who simultaneously builds the future and writes its changelog—impressive, until you realize your TL;DR is a 2,000-word elegy and half of us are still on the 'what is a VLA?' tutorial.","win":"Helped transform general-purpose robot learning from a fringe idea into a normalized roadmap and played a leading role in Gemini Robotics’ leap to SOTA vision-language-action control — a milestone that visibly moved both the research community and public conversation."},"tweets":[{"bookmarked":false,"display_text_range":[0,273],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/AKL2gNY5Pa","expanded_url":"https://x.com/xiao_ted/status/1899843068356084193/video/1","id_str":"1899839896124284928","indices":[274,297],"media_key":"7_1899839896124284928","media_url_https":"https://pbs.twimg.com/ext_tw_video_thumb/1899839896124284928/pu/img/dCP7eyMcO5Idms1f.jpg","type":"video","url":"https://t.co/AKL2gNY5Pa","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":1080,"w":1920,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1080,"width":1920,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":31261,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/pl/ajBZ58kU3EcxxQhN.m3u8?tag=12"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/480x270/fi8D5GuLoyHGu2N5.mp4?tag=12"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/640x360/PeR4JL4IPkWlE7te.mp4?tag=12"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/1280x720/ScOW4NbEG0adwKWp.mp4?tag=12"}]},"media_results":{"result":{"media_key":"7_1899839896124284928"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/AKL2gNY5Pa","expanded_url":"https://x.com/xiao_ted/status/1899843068356084193/video/1","id_str":"1899839896124284928","indices":[274,297],"media_key":"7_1899839896124284928","media_url_https":"https://pbs.twimg.com/ext_tw_video_thumb/1899839896124284928/pu/img/dCP7eyMcO5Idms1f.jpg","type":"video","url":"https://t.co/AKL2gNY5Pa","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":1080,"w":1920,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1080,"width":1920,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":31261,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/pl/ajBZ58kU3EcxxQhN.m3u8?tag=12"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/480x270/fi8D5GuLoyHGu2N5.mp4?tag=12"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/640x360/PeR4JL4IPkWlE7te.mp4?tag=12"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/1280x720/ScOW4NbEG0adwKWp.mp4?tag=12"}]},"media_results":{"result":{"media_key":"7_1899839896124284928"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1899843068356084193","view_count":148728,"bookmark_count":782,"created_at":1741792859000,"favorite_count":1495,"quote_count":33,"reply_count":26,"retweet_count":202,"user_id_str":"1976589691","conversation_id_str":"1899843068356084193","full_text":"📢 First contact between a frontier model and robots!\n\nGemini Robotics is a SOTA generalist Vision-Language-Action model bringing frontier model intelligence to the physical world. It's an extremely capable model enabling dexterous, steerable, and general robot control. 🧵⬇️ https://t.co/AKL2gNY5Pa","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,275],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/5cda2pra9s","expanded_url":"https://twitter.com/xiao_ted/status/1613657870918381568/photo/1","id_str":"1613652811077812224","indices":[276,299],"media_key":"16_1613652811077812224","media_url_https":"https://pbs.twimg.com/tweet_video_thumb/FmTYrqMagAA2EmH.jpg","type":"animated_gif","url":"https://t.co/5CdA2Pra9s","ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":360,"w":640,"resize":"fit"},"medium":{"h":360,"w":640,"resize":"fit"},"small":{"h":360,"w":640,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":360,"width":640,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"variants":[{"bitrate":0,"content_type":"video/mp4","url":"https://video.twimg.com/tweet_video/FmTYrqMagAA2EmH.mp4"}]},"media_results":{"result":{"media_key":"16_1613652811077812224"}}}],"symbols":[],"timestamps":[],"urls":[{"display_url":"github.com/Rolv-Arild/Nec…","expanded_url":"https://github.com/Rolv-Arild/Necto","url":"https://t.co/DhBX3RjT5n","indices":[176,199]}],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/5cda2pra9s","expanded_url":"https://twitter.com/xiao_ted/status/1613657870918381568/photo/1","id_str":"1613652811077812224","indices":[276,299],"media_key":"16_1613652811077812224","media_url_https":"https://pbs.twimg.com/tweet_video_thumb/FmTYrqMagAA2EmH.jpg","type":"animated_gif","url":"https://t.co/5CdA2Pra9s","ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":360,"w":640,"resize":"fit"},"medium":{"h":360,"w":640,"resize":"fit"},"small":{"h":360,"w":640,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":360,"width":640,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"variants":[{"bitrate":0,"content_type":"video/mp4","url":"https://video.twimg.com/tweet_video/FmTYrqMagAA2EmH.mp4"}]},"media_results":{"result":{"media_key":"16_1613652811077812224"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1613657870918381568","view_count":129503,"bookmark_count":139,"created_at":1673560991000,"favorite_count":618,"quote_count":10,"reply_count":11,"retweet_count":94,"user_id_str":"1976589691","conversation_id_str":"1613657870918381568","full_text":"🚨New RL impact just dropped🚨\n\n1) My friend is a high level Rocket League player and just alerted me that an open-sourced agent trained with reinforcement learning + self play (https://t.co/DhBX3RjT5n) has been steamrolling on public servers! It's in the top 0.5% ELO bracket. https://t.co/5CdA2Pra9s","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,279],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903616117219328","indices":[280,303],"media_key":"3_1986903616117219328","media_url_https":"https://pbs.twimg.com/media/G5LmT9GbIAAiSmw.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":675,"y":416,"h":69,"w":69},{"x":1229,"y":419,"h":71,"w":71},{"x":1131,"y":421,"h":71,"w":71},{"x":947,"y":441,"h":73,"w":73},{"x":811,"y":457,"h":69,"w":69},{"x":573,"y":480,"h":75,"w":75},{"x":411,"y":521,"h":73,"w":73},{"x":267,"y":521,"h":79,"w":79},{"x":1077,"y":655,"h":81,"w":81},{"x":751,"y":689,"h":69,"w":69},{"x":1179,"y":731,"h":77,"w":77},{"x":673,"y":829,"h":73,"w":73},{"x":1161,"y":823,"h":89,"w":89},{"x":375,"y":855,"h":79,"w":79},{"x":361,"y":1287,"h":83,"w":83},{"x":1409,"y":429,"h":81,"w":81},{"x":1475,"y":481,"h":91,"w":91},{"x":1555,"y":485,"h":99,"w":99},{"x":923,"y":675,"h":81,"w":81},{"x":992,"y":817,"h":85,"w":85}]},"medium":{"faces":[{"x":395,"y":243,"h":40,"w":40},{"x":720,"y":245,"h":41,"w":41},{"x":663,"y":247,"h":41,"w":41},{"x":555,"y":258,"h":43,"w":43},{"x":475,"y":268,"h":40,"w":40},{"x":336,"y":281,"h":44,"w":44},{"x":241,"y":305,"h":43,"w":43},{"x":156,"y":305,"h":46,"w":46},{"x":631,"y":384,"h":47,"w":47},{"x":440,"y":404,"h":40,"w":40},{"x":691,"y":428,"h":45,"w":45},{"x":394,"y":486,"h":43,"w":43},{"x":680,"y":482,"h":52,"w":52},{"x":220,"y":501,"h":46,"w":46},{"x":211,"y":754,"h":49,"w":49},{"x":825,"y":251,"h":47,"w":47},{"x":864,"y":282,"h":53,"w":53},{"x":911,"y":284,"h":58,"w":58},{"x":541,"y":395,"h":47,"w":47},{"x":581,"y":479,"h":50,"w":50}]},"small":{"faces":[{"x":224,"y":138,"h":23,"w":23},{"x":408,"y":139,"h":23,"w":23},{"x":375,"y":139,"h":23,"w":23},{"x":314,"y":146,"h":24,"w":24},{"x":269,"y":151,"h":23,"w":23},{"x":190,"y":159,"h":25,"w":25},{"x":136,"y":173,"h":24,"w":24},{"x":88,"y":173,"h":26,"w":26},{"x":357,"y":217,"h":27,"w":27},{"x":249,"y":229,"h":23,"w":23},{"x":391,"y":243,"h":25,"w":25},{"x":223,"y":275,"h":24,"w":24},{"x":385,"y":273,"h":29,"w":29},{"x":124,"y":284,"h":26,"w":26},{"x":120,"y":427,"h":27,"w":27},{"x":468,"y":142,"h":27,"w":27},{"x":489,"y":159,"h":30,"w":30},{"x":516,"y":161,"h":33,"w":33},{"x":306,"y":224,"h":27,"w":27},{"x":329,"y":271,"h":28,"w":28}]},"orig":{"faces":[{"x":1330,"y":819,"h":137,"w":137},{"x":2421,"y":826,"h":141,"w":141},{"x":2228,"y":830,"h":141,"w":141},{"x":1866,"y":870,"h":145,"w":145},{"x":1598,"y":901,"h":137,"w":137},{"x":1130,"y":945,"h":149,"w":149},{"x":811,"y":1027,"h":145,"w":145},{"x":527,"y":1027,"h":157,"w":157},{"x":2122,"y":1291,"h":161,"w":161},{"x":1480,"y":1358,"h":137,"w":137},{"x":2323,"y":1441,"h":153,"w":153},{"x":1326,"y":1634,"h":145,"w":145},{"x":2287,"y":1622,"h":177,"w":177},{"x":740,"y":1685,"h":157,"w":157},{"x":712,"y":2535,"h":165,"w":165},{"x":2775,"y":846,"h":161,"w":161},{"x":2905,"y":948,"h":181,"w":181},{"x":3063,"y":956,"h":196,"w":196},{"x":1819,"y":1330,"h":161,"w":161},{"x":1953,"y":1610,"h":169,"w":169}]}},"sizes":{"large":{"h":1536,"w":2048,"resize":"fit"},"medium":{"h":900,"w":1200,"resize":"fit"},"small":{"h":510,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":3024,"width":4032,"focus_rects":[{"x":0,"y":0,"w":4032,"h":2258},{"x":1008,"y":0,"w":3024,"h":3024},{"x":1379,"y":0,"w":2653,"h":3024},{"x":2368,"y":0,"w":1512,"h":3024},{"x":0,"y":0,"w":4032,"h":3024}]},"media_results":{"result":{"media_key":"3_1986903616117219328"}}},{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903632386920448","indices":[280,303],"media_key":"3_1986903632386920448","media_url_https":"https://pbs.twimg.com/media/G5LmU5tbEAAbtts.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":1041,"y":989,"h":65,"w":65},{"x":1089,"y":1045,"h":73,"w":73},{"x":1201,"y":1093,"h":75,"w":75},{"x":331,"y":1093,"h":81,"w":81},{"x":1269,"y":1167,"h":83,"w":83},{"x":231,"y":1127,"h":83,"w":83}]},"medium":{"faces":[{"x":610,"y":580,"h":38,"w":38},{"x":638,"y":612,"h":43,"w":43},{"x":704,"y":640,"h":44,"w":44},{"x":194,"y":640,"h":47,"w":47},{"x":744,"y":684,"h":49,"w":49},{"x":135,"y":660,"h":49,"w":49}]},"small":{"faces":[{"x":345,"y":328,"h":21,"w":21},{"x":361,"y":347,"h":24,"w":24},{"x":399,"y":363,"h":25,"w":25},{"x":110,"y":363,"h":27,"w":27},{"x":421,"y":387,"h":27,"w":27},{"x":76,"y":374,"h":27,"w":27}]},"orig":{"faces":[{"x":2051,"y":1949,"h":129,"w":129},{"x":2145,"y":2059,"h":145,"w":145},{"x":2366,"y":2153,"h":149,"w":149},{"x":653,"y":2153,"h":161,"w":161},{"x":2500,"y":2299,"h":165,"w":165},{"x":456,"y":2220,"h":165,"w":165}]}},"sizes":{"large":{"h":2048,"w":1536,"resize":"fit"},"medium":{"h":1200,"w":900,"resize":"fit"},"small":{"h":680,"w":510,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":4032,"width":3024,"focus_rects":[{"x":0,"y":1674,"w":3024,"h":1693},{"x":0,"y":1008,"w":3024,"h":3024},{"x":0,"y":585,"w":3024,"h":3447},{"x":1008,"y":0,"w":2016,"h":4032},{"x":0,"y":0,"w":3024,"h":4032}]},"media_results":{"result":{"media_key":"3_1986903632386920448"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903616117219328","indices":[280,303],"media_key":"3_1986903616117219328","media_url_https":"https://pbs.twimg.com/media/G5LmT9GbIAAiSmw.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":675,"y":416,"h":69,"w":69},{"x":1229,"y":419,"h":71,"w":71},{"x":1131,"y":421,"h":71,"w":71},{"x":947,"y":441,"h":73,"w":73},{"x":811,"y":457,"h":69,"w":69},{"x":573,"y":480,"h":75,"w":75},{"x":411,"y":521,"h":73,"w":73},{"x":267,"y":521,"h":79,"w":79},{"x":1077,"y":655,"h":81,"w":81},{"x":751,"y":689,"h":69,"w":69},{"x":1179,"y":731,"h":77,"w":77},{"x":673,"y":829,"h":73,"w":73},{"x":1161,"y":823,"h":89,"w":89},{"x":375,"y":855,"h":79,"w":79},{"x":361,"y":1287,"h":83,"w":83},{"x":1409,"y":429,"h":81,"w":81},{"x":1475,"y":481,"h":91,"w":91},{"x":1555,"y":485,"h":99,"w":99},{"x":923,"y":675,"h":81,"w":81},{"x":992,"y":817,"h":85,"w":85}]},"medium":{"faces":[{"x":395,"y":243,"h":40,"w":40},{"x":720,"y":245,"h":41,"w":41},{"x":663,"y":247,"h":41,"w":41},{"x":555,"y":258,"h":43,"w":43},{"x":475,"y":268,"h":40,"w":40},{"x":336,"y":281,"h":44,"w":44},{"x":241,"y":305,"h":43,"w":43},{"x":156,"y":305,"h":46,"w":46},{"x":631,"y":384,"h":47,"w":47},{"x":440,"y":404,"h":40,"w":40},{"x":691,"y":428,"h":45,"w":45},{"x":394,"y":486,"h":43,"w":43},{"x":680,"y":482,"h":52,"w":52},{"x":220,"y":501,"h":46,"w":46},{"x":211,"y":754,"h":49,"w":49},{"x":825,"y":251,"h":47,"w":47},{"x":864,"y":282,"h":53,"w":53},{"x":911,"y":284,"h":58,"w":58},{"x":541,"y":395,"h":47,"w":47},{"x":581,"y":479,"h":50,"w":50}]},"small":{"faces":[{"x":224,"y":138,"h":23,"w":23},{"x":408,"y":139,"h":23,"w":23},{"x":375,"y":139,"h":23,"w":23},{"x":314,"y":146,"h":24,"w":24},{"x":269,"y":151,"h":23,"w":23},{"x":190,"y":159,"h":25,"w":25},{"x":136,"y":173,"h":24,"w":24},{"x":88,"y":173,"h":26,"w":26},{"x":357,"y":217,"h":27,"w":27},{"x":249,"y":229,"h":23,"w":23},{"x":391,"y":243,"h":25,"w":25},{"x":223,"y":275,"h":24,"w":24},{"x":385,"y":273,"h":29,"w":29},{"x":124,"y":284,"h":26,"w":26},{"x":120,"y":427,"h":27,"w":27},{"x":468,"y":142,"h":27,"w":27},{"x":489,"y":159,"h":30,"w":30},{"x":516,"y":161,"h":33,"w":33},{"x":306,"y":224,"h":27,"w":27},{"x":329,"y":271,"h":28,"w":28}]},"orig":{"faces":[{"x":1330,"y":819,"h":137,"w":137},{"x":2421,"y":826,"h":141,"w":141},{"x":2228,"y":830,"h":141,"w":141},{"x":1866,"y":870,"h":145,"w":145},{"x":1598,"y":901,"h":137,"w":137},{"x":1130,"y":945,"h":149,"w":149},{"x":811,"y":1027,"h":145,"w":145},{"x":527,"y":1027,"h":157,"w":157},{"x":2122,"y":1291,"h":161,"w":161},{"x":1480,"y":1358,"h":137,"w":137},{"x":2323,"y":1441,"h":153,"w":153},{"x":1326,"y":1634,"h":145,"w":145},{"x":2287,"y":1622,"h":177,"w":177},{"x":740,"y":1685,"h":157,"w":157},{"x":712,"y":2535,"h":165,"w":165},{"x":2775,"y":846,"h":161,"w":161},{"x":2905,"y":948,"h":181,"w":181},{"x":3063,"y":956,"h":196,"w":196},{"x":1819,"y":1330,"h":161,"w":161},{"x":1953,"y":1610,"h":169,"w":169}]}},"sizes":{"large":{"h":1536,"w":2048,"resize":"fit"},"medium":{"h":900,"w":1200,"resize":"fit"},"small":{"h":510,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":3024,"width":4032,"focus_rects":[{"x":0,"y":0,"w":4032,"h":2258},{"x":1008,"y":0,"w":3024,"h":3024},{"x":1379,"y":0,"w":2653,"h":3024},{"x":2368,"y":0,"w":1512,"h":3024},{"x":0,"y":0,"w":4032,"h":3024}]},"media_results":{"result":{"media_key":"3_1986903616117219328"}}},{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903632386920448","indices":[280,303],"media_key":"3_1986903632386920448","media_url_https":"https://pbs.twimg.com/media/G5LmU5tbEAAbtts.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":1041,"y":989,"h":65,"w":65},{"x":1089,"y":1045,"h":73,"w":73},{"x":1201,"y":1093,"h":75,"w":75},{"x":331,"y":1093,"h":81,"w":81},{"x":1269,"y":1167,"h":83,"w":83},{"x":231,"y":1127,"h":83,"w":83}]},"medium":{"faces":[{"x":610,"y":580,"h":38,"w":38},{"x":638,"y":612,"h":43,"w":43},{"x":704,"y":640,"h":44,"w":44},{"x":194,"y":640,"h":47,"w":47},{"x":744,"y":684,"h":49,"w":49},{"x":135,"y":660,"h":49,"w":49}]},"small":{"faces":[{"x":345,"y":328,"h":21,"w":21},{"x":361,"y":347,"h":24,"w":24},{"x":399,"y":363,"h":25,"w":25},{"x":110,"y":363,"h":27,"w":27},{"x":421,"y":387,"h":27,"w":27},{"x":76,"y":374,"h":27,"w":27}]},"orig":{"faces":[{"x":2051,"y":1949,"h":129,"w":129},{"x":2145,"y":2059,"h":145,"w":145},{"x":2366,"y":2153,"h":149,"w":149},{"x":653,"y":2153,"h":161,"w":161},{"x":2500,"y":2299,"h":165,"w":165},{"x":456,"y":2220,"h":165,"w":165}]}},"sizes":{"large":{"h":2048,"w":1536,"resize":"fit"},"medium":{"h":1200,"w":900,"resize":"fit"},"small":{"h":680,"w":510,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":4032,"width":3024,"focus_rects":[{"x":0,"y":1674,"w":3024,"h":1693},{"x":0,"y":1008,"w":3024,"h":3024},{"x":0,"y":585,"w":3024,"h":3447},{"x":1008,"y":0,"w":2016,"h":4032},{"x":0,"y":0,"w":3024,"h":4032}]},"media_results":{"result":{"media_key":"3_1986903632386920448"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1986906891541532960","view_count":42064,"bookmark_count":87,"created_at":1762550492000,"favorite_count":472,"quote_count":4,"reply_count":46,"retweet_count":8,"user_id_str":"1976589691","conversation_id_str":"1986906891541532960","full_text":"After 8 unforgettable years, I have decided to leave Google DeepMind. I feel immensely grateful to have had the opportunity to help transform the dream of general-purpose robot learning from a heretical fringe idea into a normalized technology roadmap. It has been the honor of a lifetime to work on the most challenging and important problems of our time with the brightest, kindest, and most talented colleagues I could have wished for.\n\nThank you to Julian and Vincent for taking a chance on me back in 2017, when a ragtag team at Google Brain began exploring the potential for end-to-end learning on arm farms in the real world. The team has always dreamed big: my “starter project” with Corey and Pierre was to work on a goal-conditioned imitation policy capable of going from any initial condition (latent embedding) to any goal state. That 3-month project turned into a 2-year endeavor! But even though research ambitions were lofty, colleagues and mentors have always been grounded and compassionate by default. Alex H, Karol, Julian, and Sergey supported my vision of concurrent control RL at scale while allowing me the space to grow into a creative researcher on my own terms.\n\nThe team’s technical progress and my own research taste began to accelerate substantially in 2020, when Kanishka and Karol inspired the whole team to bet big on one single crazy moonshot: a general robot policy that could accomplish thousands of household manipulation tasks. Such an unprecedented group effort was new to the whole team but extremely satisfying—to learn how to harmoniously navigate 0-to-1 real-world systems scaling (robot fleets, teleoperators, scaled learning stacks) alongside rigorous scientific exploration (an objective comparison of the scaling properties of imitation and reinforcement learning). I learned so much from all my comrades-in-arms during this time, and even to this day, many of my research and engineering intuitions draw from the lessons I learned from Eric, Yao, Alex I, Keerthana, and Yevgen.\n\nThe following period, starting in 2022, was absolutely magical and unique in the breadth and depth of imaginative explorations that I was privileged to contribute to and lead. Exploring the potential of foundation models for robotics changed my research outlook permanently, and projects like SayCan, RT-1, and RT-2 felt like the first magically viral moments when the world started thinking more seriously about what the promise of general and performant embodied AI might look like. When the first generalist VLAs began to reliably perform tasks that we hadn’t collected data for, it was a huge lightbulb moment for our team and the field. During this time, I was immensely inspired by what high agency, manic creativity, and blazing iteration speed can do for research, learning from extremely kind and productive colleagues like Fei, Brian, Andy, Pete, Quan, Harris, and Danny. I applied this approach of wildly creative research to areas I cared about, such as creating better action representations, understanding robot generalization, and leveraging VLMs for data quality and augmentation. I am grateful to teammates who joined me on these adventurous explorations, such as Chelsea, Dorsa, Jonathan, Wenhao, Tianli, Montse, Sean, Austin, Kelly, and Paul. I also deeply appreciate all the academic collaborations during this time—ranging from multi-institution cross-embodiment learning to open-source VLAs to scalable offline evaluation to organizing workshops. Thank you, students, interns, and friends; in particular, Soroush, Jiayuan, Laura, Xuanlin, Kyle, Karl, Oier, Dhruv, Annie, Jensen, Priya, Suneel, Ike, Homanga, Hao, and Xuesu.\n\nIn the final chapter of my career at GDM, starting in 2024, I became enamored with the science and impact of frontier models and how to harness them properly in robotics. It always fundamentally bugged me that robot learning often looked like “classical” machine learning of just fitting simple distributions with small models, rather than the polished scaled systems and science of how frontier models are developed with pre-training, mid-training, and post-training. I wanted to learn about that world and figure out how to make AGI understand the physical world. I am proud of the progress we have made, and from where we started with Gemini 1.0 to today, the research innovations we have unlocked have placed both Gemini and Gemini Robotics clearly at the forefront of both fundamental world understanding and general VLA control. Thank you so much to my teammates in Embodied Reasoning who make every day bright, interesting, and fun: Fei, Jacky, Laura, Wentao, Annie, Lewis, Ksenia, Mohit, Sean, and Danny. Thank you to friends in Gemini Multimodal who taught me how to frontier model: Xi, Karel, Ishita, and Xudong. Thank you to the VLA whisperers who have shown me how very far innovation and perseverance can take you: Coline, Giulia, Claudio, Alex L, Sumeet, Ashwin, Sudeep, Debi, and Ayzaan. Thank you to mentors throughout the years who have provided shining examples that velocity and impact, and compassion, are not zero-sum: Carolina, Jie, Kanishka, Nicolas, Jonathan, Pierre, Vincent, Karol, Sergey, Chelsea, and Julian.\n\nThank you, thank you, thank you. It has been such an unbelievable adventure, and I am so fortunate to have been part of the crazy team that started the technology breakthroughs transforming the world into one where general and helpful embodied AGI is ubiquitous in society. I will always be #1 GDM fan! As for my own journey, I will be embarking on a new adventure, both familiar and very different, and hope to have more to share soon.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,281],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695168808229687303","indices":[282,305],"media_key":"3_1695168808229687303","media_url_https":"https://pbs.twimg.com/media/F4ZzDLjaUAczB3l.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":500,"w":1200,"resize":"fit"},"medium":{"h":500,"w":1200,"resize":"fit"},"small":{"h":283,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":500,"width":1200,"focus_rects":[{"x":307,"y":0,"w":893,"h":500},{"x":700,"y":0,"w":500,"h":500},{"x":761,"y":0,"w":439,"h":500},{"x":925,"y":0,"w":250,"h":500},{"x":0,"y":0,"w":1200,"h":500}]},"media_results":{"result":{"media_key":"3_1695168808229687303"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175793201270788","indices":[282,305],"media_key":"3_1695175793201270788","media_url_https":"https://pbs.twimg.com/media/F4Z5ZwmaUAQRjyr.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":534,"w":950,"resize":"fit"},"medium":{"h":534,"w":950,"resize":"fit"},"small":{"h":382,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":534,"width":950,"focus_rects":[{"x":0,"y":0,"w":950,"h":532},{"x":183,"y":0,"w":534,"h":534},{"x":216,"y":0,"w":468,"h":534},{"x":317,"y":0,"w":267,"h":534},{"x":0,"y":0,"w":950,"h":534}]},"media_results":{"result":{"media_key":"3_1695175793201270788"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175747772764162","indices":[282,305],"media_key":"3_1695175747772764162","media_url_https":"https://pbs.twimg.com/media/F4Z5XHXaUAI33jK.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":526,"w":1080,"resize":"fit"},"medium":{"h":526,"w":1080,"resize":"fit"},"small":{"h":331,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":526,"width":1080,"focus_rects":[{"x":71,"y":0,"w":939,"h":526},{"x":277,"y":0,"w":526,"h":526},{"x":310,"y":0,"w":461,"h":526},{"x":409,"y":0,"w":263,"h":526},{"x":0,"y":0,"w":1080,"h":526}]},"media_results":{"result":{"media_key":"3_1695175747772764162"}}}],"symbols":[],"timestamps":[],"urls":[{"display_url":"m.unitree.com/en/h1/","expanded_url":"https://m.unitree.com/en/h1/","url":"https://t.co/00HF931Q30","indices":[737,760]},{"display_url":"agibot.com","expanded_url":"https://www.agibot.com/","url":"https://t.co/lsVHl8ht90","indices":[929,952]},{"display_url":"youtube.com/@user-ow7ej5ss…","expanded_url":"https://www.youtube.com/@user-ow7ej5ss7j","url":"https://t.co/o6uPZu3ZH4","indices":[1185,1208]},{"display_url":"1x.tech","expanded_url":"https://www.1x.tech/","url":"https://t.co/Q8eqlN2POp","indices":[1606,1629]},{"display_url":"tesla.com/AI","expanded_url":"https://www.tesla.com/AI","url":"https://t.co/kaKuHlVdiZ","indices":[2053,2076]},{"display_url":"figure.ai","expanded_url":"https://www.figure.ai/","url":"https://t.co/aKwEpLMUg9","indices":[2494,2517]},{"display_url":"clonerobotics.com","expanded_url":"https://clonerobotics.com/","url":"https://t.co/7vEa4Ju9A1","indices":[2859,2882]}],"user_mentions":[{"id_str":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","indices":[763,779]},{"id_str":"755183838532370432","name":"1X","screen_name":"1x_tech","indices":[1631,1639]},{"id_str":"2309105822","name":"Eric Jang","screen_name":"ericjang11","indices":[1809,1820]},{"id_str":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","indices":[2078,2087]},{"id_str":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","indices":[2396,2408]},{"id_str":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","indices":[2519,2532]},{"id_str":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","indices":[2594,2607]},{"id_str":"1262880841769684992","name":"Archer","screen_name":"ArcherAviation","indices":[2677,2692]},{"id_str":"1444769514","name":"corey lynch","screen_name":"corelynch","indices":[2722,2732]},{"id_str":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","indices":[2884,2898]},{"id_str":"1244939741767897089","name":"Necromancer","screen_name":"dhanushisrad","indices":[3035,3048]}]},"extended_entities":{"media":[{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695168808229687303","indices":[282,305],"media_key":"3_1695168808229687303","media_url_https":"https://pbs.twimg.com/media/F4ZzDLjaUAczB3l.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":500,"w":1200,"resize":"fit"},"medium":{"h":500,"w":1200,"resize":"fit"},"small":{"h":283,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":500,"width":1200,"focus_rects":[{"x":307,"y":0,"w":893,"h":500},{"x":700,"y":0,"w":500,"h":500},{"x":761,"y":0,"w":439,"h":500},{"x":925,"y":0,"w":250,"h":500},{"x":0,"y":0,"w":1200,"h":500}]},"media_results":{"result":{"media_key":"3_1695168808229687303"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175793201270788","indices":[282,305],"media_key":"3_1695175793201270788","media_url_https":"https://pbs.twimg.com/media/F4Z5ZwmaUAQRjyr.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":534,"w":950,"resize":"fit"},"medium":{"h":534,"w":950,"resize":"fit"},"small":{"h":382,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":534,"width":950,"focus_rects":[{"x":0,"y":0,"w":950,"h":532},{"x":183,"y":0,"w":534,"h":534},{"x":216,"y":0,"w":468,"h":534},{"x":317,"y":0,"w":267,"h":534},{"x":0,"y":0,"w":950,"h":534}]},"media_results":{"result":{"media_key":"3_1695175793201270788"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175747772764162","indices":[282,305],"media_key":"3_1695175747772764162","media_url_https":"https://pbs.twimg.com/media/F4Z5XHXaUAI33jK.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":526,"w":1080,"resize":"fit"},"medium":{"h":526,"w":1080,"resize":"fit"},"small":{"h":331,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":526,"width":1080,"focus_rects":[{"x":71,"y":0,"w":939,"h":526},{"x":277,"y":0,"w":526,"h":526},{"x":310,"y":0,"w":461,"h":526},{"x":409,"y":0,"w":263,"h":526},{"x":0,"y":0,"w":1080,"h":526}]},"media_results":{"result":{"media_key":"3_1695175747772764162"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1695187278929481844","view_count":233579,"bookmark_count":308,"created_at":1692999117000,"favorite_count":441,"quote_count":22,"reply_count":13,"retweet_count":93,"user_id_str":"1976589691","conversation_id_str":"1695187278929481844","full_text":"🚨Big things are happening in humanoid robotics!🚨\n\nAs we saw with drones and quadruped robots, it can take a mere decade for bleeding edge R&D areas to become \"solved\" platforms for commercial consumer use cases. Once open-ended research questions around reliability, dexterity, and cost have all been answered in a resounding fashion. Today, you can take your pick of low-cost stable consumer options that may have been impossible to imagine just 10 years ago.\n\nAnd now, the writing is on the wall: the next few years will be transformative in bringing general-purpose humanoids from small scale proof-of-concept demos (ie. Atlas in the 2010s) to truly mature products available at scale.\n\n2 notable recent announcements:\n\n- Unitree H1 (https://t.co/00HF931Q30). @UnitreeRobotics did for quadrupeds what DJI did for drones. Absolutely believable that Unitree can run it back and disrupt a new form of robots.\n\n- AgiBot RAISE-A1 (https://t.co/lsVHl8ht90).\nIn case you aren't familiar with the founder 稚晖君 (Peng Zhihui), he is a legit 100x Engineer that recently left Huawei's prestigious \"Youth Genius\" program to start his own company, AgiBot. I've been following his amazing YouTube (https://t.co/o6uPZu3ZH4) for a while now, and the proof is in the pudding: it seems that Peng is now only able to hack on full-stack robotics side projects, but also ship a real production robot. From inception to an on-stage demo of self-powered bipedal locomotion without support, it took less than 6 months. \n\nThese recent entrants join other humanoid players that I'm also particularly excited by:\n\n- 1X EVE and NEO (https://t.co/Q8eqlN2POp)\n@1x_tech is well-positioned with a large head-start in building out an already impressive hardware platform and the buy-in of OpenAI. The long-term AI vision is led by my friend @ericjang11, whose prescient insight around generative modeling, imitation learning, and language-conditioning has influenced many research efforts to scale up smart robots, including those of my own team at Google DeepMind.\n\n- Tesla Optimus (https://t.co/kaKuHlVdiZ)\n@Tesla_AI impressed robotics experts with how quickly they went from marketing pitch to live hardware demo in less than a year. Once they reach some technological maturity, there are clear synergies with their existing supply chain and distribution know-how. The manipulation R&D efforts are in good hands (haha) with @julianibarz, my old manager responsible for creating the famous \"Google Arm Farm\"!\n\n- Figure 01 (https://t.co/aKwEpLMUg9)\n@Figure_robot is one of the best-funded players led by a superstar founder @adcock_brett, who has a proven track record of shipping hard tech products (prev. @ArcherAviation). Long-term AI vision led by @corelynch, my old colleague whose keen research insight created a new subfield of learning from unstructured robot play data.\n\n- Clone (https://t.co/7vEa4Ju9A1)\n@clonerobotics is taking a unique approach with bio-memetic musculoskeletal humanoids. Big bet to swing for the fences, and led by the extremely sharp @dhanushisrad. When everyone else zigs, Clone zags.\n\nThere are a ton more cool humanoid efforts but these are the ones that I'm particularly excited by, thanks to their focus on building the Robot Brain and not just the Robot Body! Embodied AI is one of the most exciting challenges of our lifetimes, and I'm exceedingly optimistic about building it.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,274],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","quoted_status_id_str":"1877157192727466330","quoted_status_permalink":{"url":"https://t.co/VllUIC9V91","expanded":"https://twitter.com/rishabjaink/status/1877157192727466330","display":"x.com/rishabjaink/st…"},"retweeted":false,"fact_check":null,"id":"1877503196811362504","view_count":45144,"bookmark_count":111,"created_at":1736466619000,"favorite_count":353,"quote_count":20,"reply_count":23,"retweet_count":40,"user_id_str":"1976589691","conversation_id_str":"1877503196811362504","full_text":"New phenomenon appearing: the latest generation of foundation models often switch to Chinese in the middle of hard CoT thinking traces.\n\nWhy? AGI labs like OpenAI and Anthropic utilize 3P data labeling services for PhD-level reasoning data for science, math, and coding; for expert labor availability and cost reasons, many of these data providers are based in China.\n\nJust as we saw Nigerian/Phillipino cultural influences on dialogue (“delve”), we are starting to see Chinese linguistic influences on reasoning 🤯","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":1,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"entities":{"hashtags":[],"media":[{"additional_media_info":{"monetizable":true},"display_url":"pic.x.com/DOmv1CMERp","expanded_url":"https://x.com/xiao_ted/status/1976673749572481222/video/1","ext_media_availability":{"status":"Available"},"id_str":"1976673490297368576","indices":[279,302],"media_key":"13_1976673490297368576","media_results":{"result":{"media_key":"13_1976673490297368576"}},"media_url_https":"https://pbs.twimg.com/amplify_video_thumb/1976673490297368576/img/jAG2Wi13_ooOQf4m.jpg","original_info":{"focus_rects":[],"height":1080,"width":1920},"sizes":{"large":{"h":1080,"resize":"fit","w":1920},"medium":{"h":675,"resize":"fit","w":1200},"small":{"h":383,"resize":"fit","w":680},"thumb":{"h":150,"resize":"crop","w":150}},"type":"video","url":"https://t.co/DOmv1CMERp","video_info":{"aspect_ratio":[16,9],"duration_millis":109800,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/amplify_video/1976673490297368576/pl/NcbFio2fZBsMSDys.m3u8"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/480x270/WLnlK9xBxNX7OXAu.mp4"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/640x360/v1iJuGZK6uuFkMRW.mp4"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/1280x720/BTM054CMq27vd6Vu.mp4"},{"bitrate":10368000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/1920x1080/xtkZVobTTmpyJT4r.mp4"}]}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"additional_media_info":{"monetizable":true},"display_url":"pic.x.com/DOmv1CMERp","expanded_url":"https://x.com/xiao_ted/status/1976673749572481222/video/1","ext_media_availability":{"status":"Available"},"id_str":"1976673490297368576","indices":[279,302],"media_key":"13_1976673490297368576","media_results":{"result":{"media_key":"13_1976673490297368576"}},"media_url_https":"https://pbs.twimg.com/amplify_video_thumb/1976673490297368576/img/jAG2Wi13_ooOQf4m.jpg","original_info":{"focus_rects":[],"height":1080,"width":1920},"sizes":{"large":{"h":1080,"resize":"fit","w":1920},"medium":{"h":675,"resize":"fit","w":1200},"small":{"h":383,"resize":"fit","w":680},"thumb":{"h":150,"resize":"crop","w":150}},"type":"video","url":"https://t.co/DOmv1CMERp","video_info":{"aspect_ratio":[16,9],"duration_millis":109800,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/amplify_video/1976673490297368576/pl/NcbFio2fZBsMSDys.m3u8"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/480x270/WLnlK9xBxNX7OXAu.mp4"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/640x360/v1iJuGZK6uuFkMRW.mp4"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/1280x720/BTM054CMq27vd6Vu.mp4"},{"bitrate":10368000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1976673490297368576/vid/avc1/1920x1080/xtkZVobTTmpyJT4r.mp4"}]}}]},"display_text_range":[0,278],"lang":"en","possibly_sensitive":false,"fact_check":null,"id":"1976673749572481222","view_count":32443,"bookmark_count":123,"created_at":1760110721000,"favorite_count":301,"quote_count":8,"reply_count":5,"retweet_count":44,"user_id_str":"1976589691","conversation_id_str":"1976673749572481222","full_text":"Fundamental spatial and temporal understanding is the bedrock upon which robots will learn motor control.\n\nThese types of Embodied Reasoning capabilities enable policy learning but also inference abilities like image or video conditioning.\n\nWe just released a new SOTA ER model! https://t.co/DOmv1CMERp","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":1774573744555,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"display_text_range":[0,266],"lang":"en","quoted_tweet":{"id":"1991204839578300813","text":"Today, we present a step-change in robotic AI @sundayrobotics.\n\nIntroducing ACT-1: A frontier robot foundation model trained on zero robot data.\n\n- Ultra long-horizon tasks\n- Zero-shot generalization\n- Advanced dexterity\n\n🧵-> https://t.co/kaj1bwyFyY","full_text":"Today, we present a step-change in robotic AI @sundayrobotics.\n\nIntroducing ACT-1: A frontier robot foundation model trained on zero robot data.\n\n- Ultra long-horizon tasks\n- Zero-shot generalization\n- Advanced dexterity\n\n🧵-> https://t.co/kaj1bwyFyY","created_at":1763575203000,"author_id":"1074448308578336768","author":{"id":"1074448308578336768","name":"Tony Zhao","username":"tonyzzhao","screen_name":"tonyzzhao","profile_image_url":"https://pbs.twimg.com/profile_images/1989853987458400256/k-l_tMCT_400x400.jpg","profile_image_url_https":"https://pbs.twimg.com/profile_images/1989853987458400256/k-l_tMCT_400x400.jpg","is_blue_verified":1},"public_metrics":{"like_count":5437,"retweet_count":652,"reply_count":434,"quote_count":457}},"fact_check":null,"id":"1991258133663031671","view_count":30474,"bookmark_count":43,"created_at":1763587909000,"favorite_count":276,"quote_count":1,"reply_count":8,"retweet_count":17,"user_id_str":"1976589691","conversation_id_str":"1991258133663031671","full_text":"This is hands down the best robotics startup launch I have seen 🔥 \n\nFull-stack innovation from hardware design to betting big on UMI to smooth and impressive policies. After 1.5 years of stealth, instantly launching as a top-5 robot foundation model team. Congrats!👏","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":1,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":1773258228053,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,272],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/l8RyO10MfL","expanded_url":"https://x.com/xiao_ted/status/1937933689654296719/video/1","id_str":"1937928448816910338","indices":[273,296],"media_key":"13_1937928448816910338","media_url_https":"https://pbs.twimg.com/amplify_video_thumb/1937928448816910338/img/Li1zGNRsKtrCtKGX.jpg","type":"video","url":"https://t.co/l8RyO10MfL","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":1228,"w":2048,"resize":"fit"},"medium":{"h":720,"w":1200,"resize":"fit"},"small":{"h":408,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1450,"width":2418,"focus_rects":[]},"video_info":{"aspect_ratio":[1209,725],"duration_millis":8979,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/amplify_video/1937928448816910338/pl/qEmTLTDCqRj_rv1z.m3u8?tag=21"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/450x270/gMWgmwtHwY92cVDP.mp4?tag=21"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/600x360/1Dc8vb8nBPCV1cEC.mp4?tag=21"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/1200x720/UKehi5yyqpIFsd0i.mp4?tag=21"},{"bitrate":10368000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/2418x1450/gpY3E6faWozq5rco.mp4?tag=21"}]},"media_results":{"result":{"media_key":"13_1937928448816910338"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/l8RyO10MfL","expanded_url":"https://x.com/xiao_ted/status/1937933689654296719/video/1","id_str":"1937928448816910338","indices":[273,296],"media_key":"13_1937928448816910338","media_url_https":"https://pbs.twimg.com/amplify_video_thumb/1937928448816910338/img/Li1zGNRsKtrCtKGX.jpg","type":"video","url":"https://t.co/l8RyO10MfL","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":1228,"w":2048,"resize":"fit"},"medium":{"h":720,"w":1200,"resize":"fit"},"small":{"h":408,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1450,"width":2418,"focus_rects":[]},"video_info":{"aspect_ratio":[1209,725],"duration_millis":8979,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/amplify_video/1937928448816910338/pl/qEmTLTDCqRj_rv1z.m3u8?tag=21"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/450x270/gMWgmwtHwY92cVDP.mp4?tag=21"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/600x360/1Dc8vb8nBPCV1cEC.mp4?tag=21"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/1200x720/UKehi5yyqpIFsd0i.mp4?tag=21"},{"bitrate":10368000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1937928448816910338/vid/avc1/2418x1450/gpY3E6faWozq5rco.mp4?tag=21"}]},"media_results":{"result":{"media_key":"13_1937928448816910338"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1937933689654296719","view_count":42374,"bookmark_count":109,"created_at":1750874371000,"favorite_count":272,"quote_count":2,"reply_count":8,"retweet_count":40,"user_id_str":"1976589691","conversation_id_str":"1937933689654296719","full_text":"Gemini 2.5's multimodal embodied reasoning capabilities are making a huge difference for many robotics researchers and industry developers.\n\nThe Gemini Robotics team has curated a blog post of use cases, recommended prompts, real-world examples, and partner case studies 🧵 https://t.co/l8RyO10MfL","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,275],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/z3RilImxpO","expanded_url":"https://x.com/xiao_ted/status/1937533839255224592/photo/1","id_str":"1937533575987101700","indices":[276,299],"media_key":"3_1937533575987101700","media_url_https":"https://pbs.twimg.com/media/GuOAhZkagAQl1xS.jpg","type":"photo","url":"https://t.co/z3RilImxpO","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[{"x":22,"y":279,"h":234,"w":234}]},"medium":{"faces":[{"x":22,"y":279,"h":234,"w":234}]},"small":{"faces":[{"x":14,"y":179,"h":150,"w":150}]},"orig":{"faces":[{"x":22,"y":279,"h":234,"w":234}]}},"sizes":{"large":{"h":594,"w":1056,"resize":"fit"},"medium":{"h":594,"w":1056,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":594,"width":1056,"focus_rects":[{"x":0,"y":0,"w":1056,"h":591},{"x":204,"y":0,"w":594,"h":594},{"x":241,"y":0,"w":521,"h":594},{"x":353,"y":0,"w":297,"h":594},{"x":0,"y":0,"w":1056,"h":594}]},"media_results":{"result":{"media_key":"3_1937533575987101700"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/z3RilImxpO","expanded_url":"https://x.com/xiao_ted/status/1937533839255224592/photo/1","id_str":"1937533575987101700","indices":[276,299],"media_key":"3_1937533575987101700","media_url_https":"https://pbs.twimg.com/media/GuOAhZkagAQl1xS.jpg","type":"photo","url":"https://t.co/z3RilImxpO","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[{"x":22,"y":279,"h":234,"w":234}]},"medium":{"faces":[{"x":22,"y":279,"h":234,"w":234}]},"small":{"faces":[{"x":14,"y":179,"h":150,"w":150}]},"orig":{"faces":[{"x":22,"y":279,"h":234,"w":234}]}},"sizes":{"large":{"h":594,"w":1056,"resize":"fit"},"medium":{"h":594,"w":1056,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":594,"width":1056,"focus_rects":[{"x":0,"y":0,"w":1056,"h":591},{"x":204,"y":0,"w":594,"h":594},{"x":241,"y":0,"w":521,"h":594},{"x":353,"y":0,"w":297,"h":594},{"x":0,"y":0,"w":1056,"h":594}]},"media_results":{"result":{"media_key":"3_1937533575987101700"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1937533839255224592","view_count":18342,"bookmark_count":100,"created_at":1750779039000,"favorite_count":270,"quote_count":7,"reply_count":7,"retweet_count":30,"user_id_str":"1976589691","conversation_id_str":"1937533839255224592","full_text":"Big things come in small and fast packages: announcing the Gemini Robotics On-Device VLA model!🤖 \n\nOur new model is optimized for local inference, while showcasing many properties Gemini Robotics excelled at: strong generalization, instruction following, and fast adaptation. https://t.co/z3RilImxpO","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"display_text_range":[0,280],"lang":"en","fact_check":null,"id":"2029346532387123276","view_count":18451,"bookmark_count":111,"created_at":1772668891000,"favorite_count":254,"quote_count":0,"reply_count":9,"retweet_count":9,"user_id_str":"1976589691","conversation_id_str":"2029346532387123276","full_text":"I’ve been building something new at Project Prometheus these past few months. General AI for the physical world is the defining problem of our time, and the founding team is absurdly strong and moving fast. We’re hiring in SF/London/Zurich for real-world ML generalists. DMs open.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"rapidapi","fetched_at":1774573744555,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":1772931601465,"poll_count":1,"poll_complete":1},{"bookmarked":false,"display_text_range":[0,274],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/gOJWhXDNpt","expanded_url":"https://x.com/xiao_ted/status/1940124772417118593/photo/1","id_str":"1940124767916290049","indices":[275,298],"media_key":"3_1940124767916290049","media_url_https":"https://pbs.twimg.com/media/Guy1MnuWcAEnwiN.jpg","type":"photo","url":"https://t.co/gOJWhXDNpt","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"1544726597093163011","name":"Russ Tedrake","screen_name":"RussTedrake","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":994,"w":2048,"resize":"fit"},"medium":{"h":582,"w":1200,"resize":"fit"},"small":{"h":330,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":994,"width":2048,"focus_rects":[{"x":0,"y":0,"w":1775,"h":994},{"x":0,"y":0,"w":994,"h":994},{"x":0,"y":0,"w":872,"h":994},{"x":110,"y":0,"w":497,"h":994},{"x":0,"y":0,"w":2048,"h":994}]},"media_results":{"result":{"media_key":"3_1940124767916290049"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[{"id_str":"1544726597093163011","name":"Russ Tedrake","screen_name":"RussTedrake","indices":[68,80]}]},"extended_entities":{"media":[{"display_url":"pic.x.com/gOJWhXDNpt","expanded_url":"https://x.com/xiao_ted/status/1940124772417118593/photo/1","id_str":"1940124767916290049","indices":[275,298],"media_key":"3_1940124767916290049","media_url_https":"https://pbs.twimg.com/media/Guy1MnuWcAEnwiN.jpg","type":"photo","url":"https://t.co/gOJWhXDNpt","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"1544726597093163011","name":"Russ Tedrake","screen_name":"RussTedrake","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":994,"w":2048,"resize":"fit"},"medium":{"h":582,"w":1200,"resize":"fit"},"small":{"h":330,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":994,"width":2048,"focus_rects":[{"x":0,"y":0,"w":1775,"h":994},{"x":0,"y":0,"w":994,"h":994},{"x":0,"y":0,"w":872,"h":994},{"x":110,"y":0,"w":497,"h":994},{"x":0,"y":0,"w":2048,"h":994}]},"media_results":{"result":{"media_key":"3_1940124767916290049"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1940124772417118593","view_count":14689,"bookmark_count":229,"created_at":1751396766000,"favorite_count":221,"quote_count":0,"reply_count":5,"retweet_count":29,"user_id_str":"1976589691","conversation_id_str":"1940124772417118593","full_text":"If you’re working on robotics and AI, the recent Stanford talk from @RussTedrake on scaling multitask robot manipulation is a mandatory watch, full stop.\n\nNo marketing, no hype. Just solid hypothesis driven science, evidence backed claims.\n\nA gold mine in today’s landscape! https://t.co/gOJWhXDNpt","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,275],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","retweeted":false,"fact_check":null,"id":"1912341558575395019","view_count":25819,"bookmark_count":29,"created_at":1744772731000,"favorite_count":202,"quote_count":4,"reply_count":25,"retweet_count":8,"user_id_str":"1976589691","conversation_id_str":"1912341558575395019","full_text":"Seeing a lot of pessimism about OpenAI on the timeline and I will take a brief break from Gemini shilling to defend OpenAI 🤔 \n\nI think many are overly fixating on the fact that recent OpenAI public models are behind the Pareto frontier of cost and capabilities. I don’t think OpenAI necessarily *needs* to be at the bleeding edge of intelligence; what I have really appreciated from OpenAI is their attention to delightful user experiences. Their investments into polished app experiences and UI matter a lot for pretty much all non-API usage; OpenAI did a great job with 4o native image gen and native audio! Shipping consumer facing AI experiences requires not only full-stack infrastructure hyperscaling but also novel research on safety, alignment, and post-training targeting specific user pain points. I think OpenAI is doing well on these fronts, and if they continue to execute on UX, a lot of consumers could continue to find value with these experiences even if future models are 20-30% “worse” than competitors.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,276],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/FKUz9JDCdW","expanded_url":"https://x.com/xiao_ted/status/1869906964580618422/video/1","id_str":"1869906356268109824","indices":[277,300],"media_key":"7_1869906356268109824","media_url_https":"https://pbs.twimg.com/ext_tw_video_thumb/1869906356268109824/pu/img/512pAhM5kBs-ltzG.jpg","type":"video","url":"https://t.co/FKUz9JDCdW","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":720,"w":1280,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":720,"width":1280,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":8000,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/pl/q7byKIFoTYGHQf4m.m3u8?tag=12"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/vid/avc1/480x270/gvjJ5hCnvrb06voW.mp4?tag=12"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/vid/avc1/640x360/UQOA9Hqe00WVWenS.mp4?tag=12"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/vid/avc1/1280x720/eTj_BYps1_EpnXVr.mp4?tag=12"}]},"media_results":{"result":{"media_key":"7_1869906356268109824"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/FKUz9JDCdW","expanded_url":"https://x.com/xiao_ted/status/1869906964580618422/video/1","id_str":"1869906356268109824","indices":[277,300],"media_key":"7_1869906356268109824","media_url_https":"https://pbs.twimg.com/ext_tw_video_thumb/1869906356268109824/pu/img/512pAhM5kBs-ltzG.jpg","type":"video","url":"https://t.co/FKUz9JDCdW","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":720,"w":1280,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":720,"width":1280,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":8000,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/pl/q7byKIFoTYGHQf4m.m3u8?tag=12"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/vid/avc1/480x270/gvjJ5hCnvrb06voW.mp4?tag=12"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/vid/avc1/640x360/UQOA9Hqe00WVWenS.mp4?tag=12"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1869906356268109824/pu/vid/avc1/1280x720/eTj_BYps1_EpnXVr.mp4?tag=12"}]},"media_results":{"result":{"media_key":"7_1869906356268109824"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1869906964580618422","view_count":42105,"bookmark_count":121,"created_at":1734655536000,"favorite_count":185,"quote_count":7,"reply_count":5,"retweet_count":29,"user_id_str":"1976589691","conversation_id_str":"1869906964580618422","full_text":"Robotics + AI has completely transformed: a perfect storm of AI breakthroughs, hardware innovation, and capital inflow. But are general robot foundation models truly just around the corner?\n\nAt recent talks, I took an honest look at hype vs. reality to share what’s missing 🧵👇 https://t.co/FKUz9JDCdW","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,269],"entities":{"hashtags":[{"indices":[47,56],"text":"ICRA2024"}],"media":[{"display_url":"pic.x.com/rdxjx8cmog","expanded_url":"https://twitter.com/xiao_ted/status/1790989305252569256/photo/1","id_str":"1790989144589828096","indices":[270,293],"media_key":"3_1790989144589828096","media_url_https":"https://pbs.twimg.com/media/GNrfI0_bgAAh9Ef.jpg","type":"photo","url":"https://t.co/RdXJX8cmOg","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2977051573","name":"Quan Vuong","screen_name":"QuanVng","type":"user"},{"user_id":"3377714115","name":"Karl Pertsch","screen_name":"KarlPertsch","type":"user"},{"user_id":"89583009","name":"Ken Goldberg","screen_name":"Ken_Goldberg","type":"user"},{"user_id":"1249492212","name":"Karol Hausman","screen_name":"hausman_k","type":"user"},{"user_id":"990433714948661250","name":"Sergey Levine","screen_name":"svlevine","type":"user"},{"user_id":"1140667999176679424","name":"Lerrel Pinto","screen_name":"LerrelPinto","type":"user"},{"user_id":"15751831","name":"Yuke Zhu","screen_name":"yukez","type":"user"},{"user_id":"2364317023","name":"Dorsa Sadigh","screen_name":"DorsaSadigh","type":"user"}]},"large":{"faces":[{"x":585,"y":421,"h":74,"w":74}]},"medium":{"faces":[{"x":585,"y":421,"h":74,"w":74}]},"small":{"faces":[{"x":334,"y":240,"h":42,"w":42}]},"orig":{"faces":[{"x":585,"y":421,"h":74,"w":74}]}},"sizes":{"large":{"h":839,"w":1189,"resize":"fit"},"medium":{"h":839,"w":1189,"resize":"fit"},"small":{"h":480,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":839,"width":1189,"focus_rects":[{"x":0,"y":0,"w":1189,"h":666},{"x":26,"y":0,"w":839,"h":839},{"x":77,"y":0,"w":736,"h":839},{"x":235,"y":0,"w":420,"h":839},{"x":0,"y":0,"w":1189,"h":839}]},"media_results":{"result":{"media_key":"3_1790989144589828096"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.twitter.com/RdXJX8cmOg","expanded_url":"https://twitter.com/xiao_ted/status/1790989305252569256/photo/1","id_str":"1790989144589828096","indices":[270,293],"media_key":"3_1790989144589828096","media_url_https":"https://pbs.twimg.com/media/GNrfI0_bgAAh9Ef.jpg","type":"photo","url":"https://t.co/RdXJX8cmOg","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2977051573","name":"Quan Vuong","screen_name":"QuanVng","type":"user"},{"user_id":"3377714115","name":"Karl Pertsch","screen_name":"KarlPertsch","type":"user"},{"user_id":"89583009","name":"Ken Goldberg","screen_name":"Ken_Goldberg","type":"user"},{"user_id":"1249492212","name":"Karol Hausman","screen_name":"hausman_k","type":"user"},{"user_id":"990433714948661250","name":"Sergey Levine","screen_name":"svlevine","type":"user"},{"user_id":"1140667999176679424","name":"Lerrel Pinto","screen_name":"LerrelPinto","type":"user"},{"user_id":"15751831","name":"Yuke Zhu","screen_name":"yukez","type":"user"},{"user_id":"2364317023","name":"Dorsa Sadigh","screen_name":"DorsaSadigh","type":"user"}]},"large":{"faces":[{"x":585,"y":421,"h":74,"w":74}]},"medium":{"faces":[{"x":585,"y":421,"h":74,"w":74}]},"small":{"faces":[{"x":334,"y":240,"h":42,"w":42}]},"orig":{"faces":[{"x":585,"y":421,"h":74,"w":74}]}},"sizes":{"large":{"h":839,"w":1189,"resize":"fit"},"medium":{"h":839,"w":1189,"resize":"fit"},"small":{"h":480,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":839,"width":1189,"focus_rects":[{"x":0,"y":0,"w":1189,"h":666},{"x":26,"y":0,"w":839,"h":839},{"x":77,"y":0,"w":736,"h":839},{"x":235,"y":0,"w":420,"h":839},{"x":0,"y":0,"w":1189,"h":839}]},"media_results":{"result":{"media_key":"3_1790989144589828096"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1790989305252569256","view_count":34542,"bookmark_count":19,"created_at":1715840100000,"favorite_count":184,"quote_count":8,"reply_count":5,"retweet_count":31,"user_id_str":"1976589691","conversation_id_str":"1790989305252569256","full_text":"Open X-Embodiment wins the Best Paper Award at #ICRA2024 🎉🤖!\n\nAn unprecedented Best Paper 170+ author list (most didn’t fit on the slide) may be a record for ICRA! So amazing to see what a collaborative community effort can accomplish in pushing robotics + AI forward 🚀 https://t.co/RdXJX8cmOg","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,278],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/c3pBg3ZFVj","expanded_url":"https://x.com/xiao_ted/status/1971248874875650547/photo/1","id_str":"1971246424311635969","indices":[279,302],"media_key":"3_1971246424311635969","media_url_https":"https://pbs.twimg.com/media/G1tGLcXaoAElqG3.jpg","type":"photo","url":"https://t.co/c3pBg3ZFVj","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[{"x":719,"y":185,"h":87,"w":87}]},"medium":{"faces":[{"x":421,"y":108,"h":51,"w":51}]},"small":{"faces":[{"x":238,"y":61,"h":29,"w":29}]},"orig":{"faces":[{"x":753,"y":194,"h":92,"w":92}]}},"sizes":{"large":{"h":1152,"w":2048,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1206,"width":2144,"focus_rects":[{"x":0,"y":5,"w":2144,"h":1201},{"x":522,"y":0,"w":1206,"h":1206},{"x":596,"y":0,"w":1058,"h":1206},{"x":824,"y":0,"w":603,"h":1206},{"x":0,"y":0,"w":2144,"h":1206}]},"media_results":{"result":{"media_key":"3_1971246424311635969"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/c3pBg3ZFVj","expanded_url":"https://x.com/xiao_ted/status/1971248874875650547/photo/1","id_str":"1971246424311635969","indices":[279,302],"media_key":"3_1971246424311635969","media_url_https":"https://pbs.twimg.com/media/G1tGLcXaoAElqG3.jpg","type":"photo","url":"https://t.co/c3pBg3ZFVj","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[{"x":719,"y":185,"h":87,"w":87}]},"medium":{"faces":[{"x":421,"y":108,"h":51,"w":51}]},"small":{"faces":[{"x":238,"y":61,"h":29,"w":29}]},"orig":{"faces":[{"x":753,"y":194,"h":92,"w":92}]}},"sizes":{"large":{"h":1152,"w":2048,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1206,"width":2144,"focus_rects":[{"x":0,"y":5,"w":2144,"h":1201},{"x":522,"y":0,"w":1206,"h":1206},{"x":596,"y":0,"w":1058,"h":1206},{"x":824,"y":0,"w":603,"h":1206},{"x":0,"y":0,"w":2144,"h":1206}]},"media_results":{"result":{"media_key":"3_1971246424311635969"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1971248874875650547","view_count":22591,"bookmark_count":52,"created_at":1758817330000,"favorite_count":181,"quote_count":9,"reply_count":6,"retweet_count":36,"user_id_str":"1976589691","conversation_id_str":"1971248874875650547","full_text":"📢The next milestone for intelligent general-purpose robots has arrived!\n\nAnnouncing Gemini Robotics 1.5, our flagship system which brings breakthroughs from frontier models to the physical world with two new SOTA generalists: the GR 1.5 VLA and GR 1.5 embodied reasoning model 🧵","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,115],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[{"display_url":"boards.greenhouse.io/deepmind/jobs/…","expanded_url":"https://boards.greenhouse.io/deepmind/jobs/5850044","url":"https://t.co/AZ1gNq5DpZ","indices":[92,115]}],"user_mentions":[]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1772655421896954232","view_count":36436,"bookmark_count":72,"created_at":1711468961000,"favorite_count":167,"quote_count":1,"reply_count":7,"retweet_count":40,"user_id_str":"1976589691","conversation_id_str":"1772655421896954232","full_text":"Our team is hiring strong research engineers to work on scaling robotics + AI!\n\nApply here: https://t.co/AZ1gNq5DpZ","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0}],"ctweets":[{"bookmarked":false,"display_text_range":[0,279],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903616117219328","indices":[280,303],"media_key":"3_1986903616117219328","media_url_https":"https://pbs.twimg.com/media/G5LmT9GbIAAiSmw.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":675,"y":416,"h":69,"w":69},{"x":1229,"y":419,"h":71,"w":71},{"x":1131,"y":421,"h":71,"w":71},{"x":947,"y":441,"h":73,"w":73},{"x":811,"y":457,"h":69,"w":69},{"x":573,"y":480,"h":75,"w":75},{"x":411,"y":521,"h":73,"w":73},{"x":267,"y":521,"h":79,"w":79},{"x":1077,"y":655,"h":81,"w":81},{"x":751,"y":689,"h":69,"w":69},{"x":1179,"y":731,"h":77,"w":77},{"x":673,"y":829,"h":73,"w":73},{"x":1161,"y":823,"h":89,"w":89},{"x":375,"y":855,"h":79,"w":79},{"x":361,"y":1287,"h":83,"w":83},{"x":1409,"y":429,"h":81,"w":81},{"x":1475,"y":481,"h":91,"w":91},{"x":1555,"y":485,"h":99,"w":99},{"x":923,"y":675,"h":81,"w":81},{"x":992,"y":817,"h":85,"w":85}]},"medium":{"faces":[{"x":395,"y":243,"h":40,"w":40},{"x":720,"y":245,"h":41,"w":41},{"x":663,"y":247,"h":41,"w":41},{"x":555,"y":258,"h":43,"w":43},{"x":475,"y":268,"h":40,"w":40},{"x":336,"y":281,"h":44,"w":44},{"x":241,"y":305,"h":43,"w":43},{"x":156,"y":305,"h":46,"w":46},{"x":631,"y":384,"h":47,"w":47},{"x":440,"y":404,"h":40,"w":40},{"x":691,"y":428,"h":45,"w":45},{"x":394,"y":486,"h":43,"w":43},{"x":680,"y":482,"h":52,"w":52},{"x":220,"y":501,"h":46,"w":46},{"x":211,"y":754,"h":49,"w":49},{"x":825,"y":251,"h":47,"w":47},{"x":864,"y":282,"h":53,"w":53},{"x":911,"y":284,"h":58,"w":58},{"x":541,"y":395,"h":47,"w":47},{"x":581,"y":479,"h":50,"w":50}]},"small":{"faces":[{"x":224,"y":138,"h":23,"w":23},{"x":408,"y":139,"h":23,"w":23},{"x":375,"y":139,"h":23,"w":23},{"x":314,"y":146,"h":24,"w":24},{"x":269,"y":151,"h":23,"w":23},{"x":190,"y":159,"h":25,"w":25},{"x":136,"y":173,"h":24,"w":24},{"x":88,"y":173,"h":26,"w":26},{"x":357,"y":217,"h":27,"w":27},{"x":249,"y":229,"h":23,"w":23},{"x":391,"y":243,"h":25,"w":25},{"x":223,"y":275,"h":24,"w":24},{"x":385,"y":273,"h":29,"w":29},{"x":124,"y":284,"h":26,"w":26},{"x":120,"y":427,"h":27,"w":27},{"x":468,"y":142,"h":27,"w":27},{"x":489,"y":159,"h":30,"w":30},{"x":516,"y":161,"h":33,"w":33},{"x":306,"y":224,"h":27,"w":27},{"x":329,"y":271,"h":28,"w":28}]},"orig":{"faces":[{"x":1330,"y":819,"h":137,"w":137},{"x":2421,"y":826,"h":141,"w":141},{"x":2228,"y":830,"h":141,"w":141},{"x":1866,"y":870,"h":145,"w":145},{"x":1598,"y":901,"h":137,"w":137},{"x":1130,"y":945,"h":149,"w":149},{"x":811,"y":1027,"h":145,"w":145},{"x":527,"y":1027,"h":157,"w":157},{"x":2122,"y":1291,"h":161,"w":161},{"x":1480,"y":1358,"h":137,"w":137},{"x":2323,"y":1441,"h":153,"w":153},{"x":1326,"y":1634,"h":145,"w":145},{"x":2287,"y":1622,"h":177,"w":177},{"x":740,"y":1685,"h":157,"w":157},{"x":712,"y":2535,"h":165,"w":165},{"x":2775,"y":846,"h":161,"w":161},{"x":2905,"y":948,"h":181,"w":181},{"x":3063,"y":956,"h":196,"w":196},{"x":1819,"y":1330,"h":161,"w":161},{"x":1953,"y":1610,"h":169,"w":169}]}},"sizes":{"large":{"h":1536,"w":2048,"resize":"fit"},"medium":{"h":900,"w":1200,"resize":"fit"},"small":{"h":510,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":3024,"width":4032,"focus_rects":[{"x":0,"y":0,"w":4032,"h":2258},{"x":1008,"y":0,"w":3024,"h":3024},{"x":1379,"y":0,"w":2653,"h":3024},{"x":2368,"y":0,"w":1512,"h":3024},{"x":0,"y":0,"w":4032,"h":3024}]},"media_results":{"result":{"media_key":"3_1986903616117219328"}}},{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903632386920448","indices":[280,303],"media_key":"3_1986903632386920448","media_url_https":"https://pbs.twimg.com/media/G5LmU5tbEAAbtts.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":1041,"y":989,"h":65,"w":65},{"x":1089,"y":1045,"h":73,"w":73},{"x":1201,"y":1093,"h":75,"w":75},{"x":331,"y":1093,"h":81,"w":81},{"x":1269,"y":1167,"h":83,"w":83},{"x":231,"y":1127,"h":83,"w":83}]},"medium":{"faces":[{"x":610,"y":580,"h":38,"w":38},{"x":638,"y":612,"h":43,"w":43},{"x":704,"y":640,"h":44,"w":44},{"x":194,"y":640,"h":47,"w":47},{"x":744,"y":684,"h":49,"w":49},{"x":135,"y":660,"h":49,"w":49}]},"small":{"faces":[{"x":345,"y":328,"h":21,"w":21},{"x":361,"y":347,"h":24,"w":24},{"x":399,"y":363,"h":25,"w":25},{"x":110,"y":363,"h":27,"w":27},{"x":421,"y":387,"h":27,"w":27},{"x":76,"y":374,"h":27,"w":27}]},"orig":{"faces":[{"x":2051,"y":1949,"h":129,"w":129},{"x":2145,"y":2059,"h":145,"w":145},{"x":2366,"y":2153,"h":149,"w":149},{"x":653,"y":2153,"h":161,"w":161},{"x":2500,"y":2299,"h":165,"w":165},{"x":456,"y":2220,"h":165,"w":165}]}},"sizes":{"large":{"h":2048,"w":1536,"resize":"fit"},"medium":{"h":1200,"w":900,"resize":"fit"},"small":{"h":680,"w":510,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":4032,"width":3024,"focus_rects":[{"x":0,"y":1674,"w":3024,"h":1693},{"x":0,"y":1008,"w":3024,"h":3024},{"x":0,"y":585,"w":3024,"h":3447},{"x":1008,"y":0,"w":2016,"h":4032},{"x":0,"y":0,"w":3024,"h":4032}]},"media_results":{"result":{"media_key":"3_1986903632386920448"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903616117219328","indices":[280,303],"media_key":"3_1986903616117219328","media_url_https":"https://pbs.twimg.com/media/G5LmT9GbIAAiSmw.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":675,"y":416,"h":69,"w":69},{"x":1229,"y":419,"h":71,"w":71},{"x":1131,"y":421,"h":71,"w":71},{"x":947,"y":441,"h":73,"w":73},{"x":811,"y":457,"h":69,"w":69},{"x":573,"y":480,"h":75,"w":75},{"x":411,"y":521,"h":73,"w":73},{"x":267,"y":521,"h":79,"w":79},{"x":1077,"y":655,"h":81,"w":81},{"x":751,"y":689,"h":69,"w":69},{"x":1179,"y":731,"h":77,"w":77},{"x":673,"y":829,"h":73,"w":73},{"x":1161,"y":823,"h":89,"w":89},{"x":375,"y":855,"h":79,"w":79},{"x":361,"y":1287,"h":83,"w":83},{"x":1409,"y":429,"h":81,"w":81},{"x":1475,"y":481,"h":91,"w":91},{"x":1555,"y":485,"h":99,"w":99},{"x":923,"y":675,"h":81,"w":81},{"x":992,"y":817,"h":85,"w":85}]},"medium":{"faces":[{"x":395,"y":243,"h":40,"w":40},{"x":720,"y":245,"h":41,"w":41},{"x":663,"y":247,"h":41,"w":41},{"x":555,"y":258,"h":43,"w":43},{"x":475,"y":268,"h":40,"w":40},{"x":336,"y":281,"h":44,"w":44},{"x":241,"y":305,"h":43,"w":43},{"x":156,"y":305,"h":46,"w":46},{"x":631,"y":384,"h":47,"w":47},{"x":440,"y":404,"h":40,"w":40},{"x":691,"y":428,"h":45,"w":45},{"x":394,"y":486,"h":43,"w":43},{"x":680,"y":482,"h":52,"w":52},{"x":220,"y":501,"h":46,"w":46},{"x":211,"y":754,"h":49,"w":49},{"x":825,"y":251,"h":47,"w":47},{"x":864,"y":282,"h":53,"w":53},{"x":911,"y":284,"h":58,"w":58},{"x":541,"y":395,"h":47,"w":47},{"x":581,"y":479,"h":50,"w":50}]},"small":{"faces":[{"x":224,"y":138,"h":23,"w":23},{"x":408,"y":139,"h":23,"w":23},{"x":375,"y":139,"h":23,"w":23},{"x":314,"y":146,"h":24,"w":24},{"x":269,"y":151,"h":23,"w":23},{"x":190,"y":159,"h":25,"w":25},{"x":136,"y":173,"h":24,"w":24},{"x":88,"y":173,"h":26,"w":26},{"x":357,"y":217,"h":27,"w":27},{"x":249,"y":229,"h":23,"w":23},{"x":391,"y":243,"h":25,"w":25},{"x":223,"y":275,"h":24,"w":24},{"x":385,"y":273,"h":29,"w":29},{"x":124,"y":284,"h":26,"w":26},{"x":120,"y":427,"h":27,"w":27},{"x":468,"y":142,"h":27,"w":27},{"x":489,"y":159,"h":30,"w":30},{"x":516,"y":161,"h":33,"w":33},{"x":306,"y":224,"h":27,"w":27},{"x":329,"y":271,"h":28,"w":28}]},"orig":{"faces":[{"x":1330,"y":819,"h":137,"w":137},{"x":2421,"y":826,"h":141,"w":141},{"x":2228,"y":830,"h":141,"w":141},{"x":1866,"y":870,"h":145,"w":145},{"x":1598,"y":901,"h":137,"w":137},{"x":1130,"y":945,"h":149,"w":149},{"x":811,"y":1027,"h":145,"w":145},{"x":527,"y":1027,"h":157,"w":157},{"x":2122,"y":1291,"h":161,"w":161},{"x":1480,"y":1358,"h":137,"w":137},{"x":2323,"y":1441,"h":153,"w":153},{"x":1326,"y":1634,"h":145,"w":145},{"x":2287,"y":1622,"h":177,"w":177},{"x":740,"y":1685,"h":157,"w":157},{"x":712,"y":2535,"h":165,"w":165},{"x":2775,"y":846,"h":161,"w":161},{"x":2905,"y":948,"h":181,"w":181},{"x":3063,"y":956,"h":196,"w":196},{"x":1819,"y":1330,"h":161,"w":161},{"x":1953,"y":1610,"h":169,"w":169}]}},"sizes":{"large":{"h":1536,"w":2048,"resize":"fit"},"medium":{"h":900,"w":1200,"resize":"fit"},"small":{"h":510,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":3024,"width":4032,"focus_rects":[{"x":0,"y":0,"w":4032,"h":2258},{"x":1008,"y":0,"w":3024,"h":3024},{"x":1379,"y":0,"w":2653,"h":3024},{"x":2368,"y":0,"w":1512,"h":3024},{"x":0,"y":0,"w":4032,"h":3024}]},"media_results":{"result":{"media_key":"3_1986903616117219328"}}},{"display_url":"pic.x.com/AhGzJ4j7nl","expanded_url":"https://x.com/xiao_ted/status/1986906891541532960/photo/1","id_str":"1986903632386920448","indices":[280,303],"media_key":"3_1986903632386920448","media_url_https":"https://pbs.twimg.com/media/G5LmU5tbEAAbtts.jpg","type":"photo","url":"https://t.co/AhGzJ4j7nl","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"},{"user_id":"3244194764","name":"Fei Xia","screen_name":"xf1280","type":"user"},{"user_id":"3773116163","name":"Laura Graesser","screen_name":"lgraesser3","type":"user"},{"user_id":"261236765","name":"Wenhao Yu","screen_name":"Stacormed","type":"user"},{"user_id":"743131030773600256","name":"Jacky Liang","screen_name":"jackyliang42","type":"user"},{"user_id":"1201760274","name":"Kanishka Rao","screen_name":"Kanishka_Rao","type":"user"},{"user_id":"1353633606967697408","name":"Coline Devin","screen_name":"ColinearDevin","type":"user"},{"user_id":"1270149841","name":"Keerthana Gopalakrishnan","screen_name":"keerthanpg","type":"user"},{"user_id":"113385589","name":"Peng Xu","screen_name":"sippeyxp","type":"user"},{"user_id":"1371217124","name":"Tianli Ding","screen_name":"TianliDing","type":"user"},{"user_id":"1587667933521592320","name":"Annie Xie","screen_name":"_anniexie","type":"user"}]},"large":{"faces":[{"x":1041,"y":989,"h":65,"w":65},{"x":1089,"y":1045,"h":73,"w":73},{"x":1201,"y":1093,"h":75,"w":75},{"x":331,"y":1093,"h":81,"w":81},{"x":1269,"y":1167,"h":83,"w":83},{"x":231,"y":1127,"h":83,"w":83}]},"medium":{"faces":[{"x":610,"y":580,"h":38,"w":38},{"x":638,"y":612,"h":43,"w":43},{"x":704,"y":640,"h":44,"w":44},{"x":194,"y":640,"h":47,"w":47},{"x":744,"y":684,"h":49,"w":49},{"x":135,"y":660,"h":49,"w":49}]},"small":{"faces":[{"x":345,"y":328,"h":21,"w":21},{"x":361,"y":347,"h":24,"w":24},{"x":399,"y":363,"h":25,"w":25},{"x":110,"y":363,"h":27,"w":27},{"x":421,"y":387,"h":27,"w":27},{"x":76,"y":374,"h":27,"w":27}]},"orig":{"faces":[{"x":2051,"y":1949,"h":129,"w":129},{"x":2145,"y":2059,"h":145,"w":145},{"x":2366,"y":2153,"h":149,"w":149},{"x":653,"y":2153,"h":161,"w":161},{"x":2500,"y":2299,"h":165,"w":165},{"x":456,"y":2220,"h":165,"w":165}]}},"sizes":{"large":{"h":2048,"w":1536,"resize":"fit"},"medium":{"h":1200,"w":900,"resize":"fit"},"small":{"h":680,"w":510,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":4032,"width":3024,"focus_rects":[{"x":0,"y":1674,"w":3024,"h":1693},{"x":0,"y":1008,"w":3024,"h":3024},{"x":0,"y":585,"w":3024,"h":3447},{"x":1008,"y":0,"w":2016,"h":4032},{"x":0,"y":0,"w":3024,"h":4032}]},"media_results":{"result":{"media_key":"3_1986903632386920448"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1986906891541532960","view_count":42064,"bookmark_count":87,"created_at":1762550492000,"favorite_count":472,"quote_count":4,"reply_count":46,"retweet_count":8,"user_id_str":"1976589691","conversation_id_str":"1986906891541532960","full_text":"After 8 unforgettable years, I have decided to leave Google DeepMind. I feel immensely grateful to have had the opportunity to help transform the dream of general-purpose robot learning from a heretical fringe idea into a normalized technology roadmap. It has been the honor of a lifetime to work on the most challenging and important problems of our time with the brightest, kindest, and most talented colleagues I could have wished for.\n\nThank you to Julian and Vincent for taking a chance on me back in 2017, when a ragtag team at Google Brain began exploring the potential for end-to-end learning on arm farms in the real world. The team has always dreamed big: my “starter project” with Corey and Pierre was to work on a goal-conditioned imitation policy capable of going from any initial condition (latent embedding) to any goal state. That 3-month project turned into a 2-year endeavor! But even though research ambitions were lofty, colleagues and mentors have always been grounded and compassionate by default. Alex H, Karol, Julian, and Sergey supported my vision of concurrent control RL at scale while allowing me the space to grow into a creative researcher on my own terms.\n\nThe team’s technical progress and my own research taste began to accelerate substantially in 2020, when Kanishka and Karol inspired the whole team to bet big on one single crazy moonshot: a general robot policy that could accomplish thousands of household manipulation tasks. Such an unprecedented group effort was new to the whole team but extremely satisfying—to learn how to harmoniously navigate 0-to-1 real-world systems scaling (robot fleets, teleoperators, scaled learning stacks) alongside rigorous scientific exploration (an objective comparison of the scaling properties of imitation and reinforcement learning). I learned so much from all my comrades-in-arms during this time, and even to this day, many of my research and engineering intuitions draw from the lessons I learned from Eric, Yao, Alex I, Keerthana, and Yevgen.\n\nThe following period, starting in 2022, was absolutely magical and unique in the breadth and depth of imaginative explorations that I was privileged to contribute to and lead. Exploring the potential of foundation models for robotics changed my research outlook permanently, and projects like SayCan, RT-1, and RT-2 felt like the first magically viral moments when the world started thinking more seriously about what the promise of general and performant embodied AI might look like. When the first generalist VLAs began to reliably perform tasks that we hadn’t collected data for, it was a huge lightbulb moment for our team and the field. During this time, I was immensely inspired by what high agency, manic creativity, and blazing iteration speed can do for research, learning from extremely kind and productive colleagues like Fei, Brian, Andy, Pete, Quan, Harris, and Danny. I applied this approach of wildly creative research to areas I cared about, such as creating better action representations, understanding robot generalization, and leveraging VLMs for data quality and augmentation. I am grateful to teammates who joined me on these adventurous explorations, such as Chelsea, Dorsa, Jonathan, Wenhao, Tianli, Montse, Sean, Austin, Kelly, and Paul. I also deeply appreciate all the academic collaborations during this time—ranging from multi-institution cross-embodiment learning to open-source VLAs to scalable offline evaluation to organizing workshops. Thank you, students, interns, and friends; in particular, Soroush, Jiayuan, Laura, Xuanlin, Kyle, Karl, Oier, Dhruv, Annie, Jensen, Priya, Suneel, Ike, Homanga, Hao, and Xuesu.\n\nIn the final chapter of my career at GDM, starting in 2024, I became enamored with the science and impact of frontier models and how to harness them properly in robotics. It always fundamentally bugged me that robot learning often looked like “classical” machine learning of just fitting simple distributions with small models, rather than the polished scaled systems and science of how frontier models are developed with pre-training, mid-training, and post-training. I wanted to learn about that world and figure out how to make AGI understand the physical world. I am proud of the progress we have made, and from where we started with Gemini 1.0 to today, the research innovations we have unlocked have placed both Gemini and Gemini Robotics clearly at the forefront of both fundamental world understanding and general VLA control. Thank you so much to my teammates in Embodied Reasoning who make every day bright, interesting, and fun: Fei, Jacky, Laura, Wentao, Annie, Lewis, Ksenia, Mohit, Sean, and Danny. Thank you to friends in Gemini Multimodal who taught me how to frontier model: Xi, Karel, Ishita, and Xudong. Thank you to the VLA whisperers who have shown me how very far innovation and perseverance can take you: Coline, Giulia, Claudio, Alex L, Sumeet, Ashwin, Sudeep, Debi, and Ayzaan. Thank you to mentors throughout the years who have provided shining examples that velocity and impact, and compassion, are not zero-sum: Carolina, Jie, Kanishka, Nicolas, Jonathan, Pierre, Vincent, Karol, Sergey, Chelsea, and Julian.\n\nThank you, thank you, thank you. It has been such an unbelievable adventure, and I am so fortunate to have been part of the crazy team that started the technology breakthroughs transforming the world into one where general and helpful embodied AGI is ubiquitous in society. I will always be #1 GDM fan! As for my own journey, I will be embarking on a new adventure, both familiar and very different, and hope to have more to share soon.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,273],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/AKL2gNY5Pa","expanded_url":"https://x.com/xiao_ted/status/1899843068356084193/video/1","id_str":"1899839896124284928","indices":[274,297],"media_key":"7_1899839896124284928","media_url_https":"https://pbs.twimg.com/ext_tw_video_thumb/1899839896124284928/pu/img/dCP7eyMcO5Idms1f.jpg","type":"video","url":"https://t.co/AKL2gNY5Pa","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":1080,"w":1920,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1080,"width":1920,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":31261,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/pl/ajBZ58kU3EcxxQhN.m3u8?tag=12"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/480x270/fi8D5GuLoyHGu2N5.mp4?tag=12"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/640x360/PeR4JL4IPkWlE7te.mp4?tag=12"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/1280x720/ScOW4NbEG0adwKWp.mp4?tag=12"}]},"media_results":{"result":{"media_key":"7_1899839896124284928"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/AKL2gNY5Pa","expanded_url":"https://x.com/xiao_ted/status/1899843068356084193/video/1","id_str":"1899839896124284928","indices":[274,297],"media_key":"7_1899839896124284928","media_url_https":"https://pbs.twimg.com/ext_tw_video_thumb/1899839896124284928/pu/img/dCP7eyMcO5Idms1f.jpg","type":"video","url":"https://t.co/AKL2gNY5Pa","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":1080,"w":1920,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1080,"width":1920,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":31261,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/pl/ajBZ58kU3EcxxQhN.m3u8?tag=12"},{"bitrate":256000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/480x270/fi8D5GuLoyHGu2N5.mp4?tag=12"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/640x360/PeR4JL4IPkWlE7te.mp4?tag=12"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/ext_tw_video/1899839896124284928/pu/vid/avc1/1280x720/ScOW4NbEG0adwKWp.mp4?tag=12"}]},"media_results":{"result":{"media_key":"7_1899839896124284928"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1899843068356084193","view_count":148728,"bookmark_count":782,"created_at":1741792859000,"favorite_count":1495,"quote_count":33,"reply_count":26,"retweet_count":202,"user_id_str":"1976589691","conversation_id_str":"1899843068356084193","full_text":"📢 First contact between a frontier model and robots!\n\nGemini Robotics is a SOTA generalist Vision-Language-Action model bringing frontier model intelligence to the physical world. It's an extremely capable model enabling dexterous, steerable, and general robot control. 🧵⬇️ https://t.co/AKL2gNY5Pa","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,275],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","retweeted":false,"fact_check":null,"id":"1912341558575395019","view_count":25819,"bookmark_count":29,"created_at":1744772731000,"favorite_count":202,"quote_count":4,"reply_count":25,"retweet_count":8,"user_id_str":"1976589691","conversation_id_str":"1912341558575395019","full_text":"Seeing a lot of pessimism about OpenAI on the timeline and I will take a brief break from Gemini shilling to defend OpenAI 🤔 \n\nI think many are overly fixating on the fact that recent OpenAI public models are behind the Pareto frontier of cost and capabilities. I don’t think OpenAI necessarily *needs* to be at the bleeding edge of intelligence; what I have really appreciated from OpenAI is their attention to delightful user experiences. Their investments into polished app experiences and UI matter a lot for pretty much all non-API usage; OpenAI did a great job with 4o native image gen and native audio! Shipping consumer facing AI experiences requires not only full-stack infrastructure hyperscaling but also novel research on safety, alignment, and post-training targeting specific user pain points. I think OpenAI is doing well on these fronts, and if they continue to execute on UX, a lot of consumers could continue to find value with these experiences even if future models are 20-30% “worse” than competitors.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,274],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","quoted_status_id_str":"1877157192727466330","quoted_status_permalink":{"url":"https://t.co/VllUIC9V91","expanded":"https://twitter.com/rishabjaink/status/1877157192727466330","display":"x.com/rishabjaink/st…"},"retweeted":false,"fact_check":null,"id":"1877503196811362504","view_count":45144,"bookmark_count":111,"created_at":1736466619000,"favorite_count":353,"quote_count":20,"reply_count":23,"retweet_count":40,"user_id_str":"1976589691","conversation_id_str":"1877503196811362504","full_text":"New phenomenon appearing: the latest generation of foundation models often switch to Chinese in the middle of hard CoT thinking traces.\n\nWhy? AGI labs like OpenAI and Anthropic utilize 3P data labeling services for PhD-level reasoning data for science, math, and coding; for expert labor availability and cost reasons, many of these data providers are based in China.\n\nJust as we saw Nigerian/Phillipino cultural influences on dialogue (“delve”), we are starting to see Chinese linguistic influences on reasoning 🤯","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":1,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,278],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","retweeted":false,"fact_check":null,"id":"1990453310676152744","view_count":10762,"bookmark_count":13,"created_at":1763396024000,"favorite_count":138,"quote_count":3,"reply_count":14,"retweet_count":9,"user_id_str":"1976589691","conversation_id_str":"1990453310676152744","full_text":"It is a travesty that all AGI labs are sprinting away from the physical world and towards digital companions, customer service bots, enterprise software, and coding agents.\n\nThat the real world is difficult and messy and unforgiving is exactly why we need to be prioritizing it.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,281],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695168808229687303","indices":[282,305],"media_key":"3_1695168808229687303","media_url_https":"https://pbs.twimg.com/media/F4ZzDLjaUAczB3l.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":500,"w":1200,"resize":"fit"},"medium":{"h":500,"w":1200,"resize":"fit"},"small":{"h":283,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":500,"width":1200,"focus_rects":[{"x":307,"y":0,"w":893,"h":500},{"x":700,"y":0,"w":500,"h":500},{"x":761,"y":0,"w":439,"h":500},{"x":925,"y":0,"w":250,"h":500},{"x":0,"y":0,"w":1200,"h":500}]},"media_results":{"result":{"media_key":"3_1695168808229687303"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175793201270788","indices":[282,305],"media_key":"3_1695175793201270788","media_url_https":"https://pbs.twimg.com/media/F4Z5ZwmaUAQRjyr.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":534,"w":950,"resize":"fit"},"medium":{"h":534,"w":950,"resize":"fit"},"small":{"h":382,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":534,"width":950,"focus_rects":[{"x":0,"y":0,"w":950,"h":532},{"x":183,"y":0,"w":534,"h":534},{"x":216,"y":0,"w":468,"h":534},{"x":317,"y":0,"w":267,"h":534},{"x":0,"y":0,"w":950,"h":534}]},"media_results":{"result":{"media_key":"3_1695175793201270788"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175747772764162","indices":[282,305],"media_key":"3_1695175747772764162","media_url_https":"https://pbs.twimg.com/media/F4Z5XHXaUAI33jK.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":526,"w":1080,"resize":"fit"},"medium":{"h":526,"w":1080,"resize":"fit"},"small":{"h":331,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":526,"width":1080,"focus_rects":[{"x":71,"y":0,"w":939,"h":526},{"x":277,"y":0,"w":526,"h":526},{"x":310,"y":0,"w":461,"h":526},{"x":409,"y":0,"w":263,"h":526},{"x":0,"y":0,"w":1080,"h":526}]},"media_results":{"result":{"media_key":"3_1695175747772764162"}}}],"symbols":[],"timestamps":[],"urls":[{"display_url":"m.unitree.com/en/h1/","expanded_url":"https://m.unitree.com/en/h1/","url":"https://t.co/00HF931Q30","indices":[737,760]},{"display_url":"agibot.com","expanded_url":"https://www.agibot.com/","url":"https://t.co/lsVHl8ht90","indices":[929,952]},{"display_url":"youtube.com/@user-ow7ej5ss…","expanded_url":"https://www.youtube.com/@user-ow7ej5ss7j","url":"https://t.co/o6uPZu3ZH4","indices":[1185,1208]},{"display_url":"1x.tech","expanded_url":"https://www.1x.tech/","url":"https://t.co/Q8eqlN2POp","indices":[1606,1629]},{"display_url":"tesla.com/AI","expanded_url":"https://www.tesla.com/AI","url":"https://t.co/kaKuHlVdiZ","indices":[2053,2076]},{"display_url":"figure.ai","expanded_url":"https://www.figure.ai/","url":"https://t.co/aKwEpLMUg9","indices":[2494,2517]},{"display_url":"clonerobotics.com","expanded_url":"https://clonerobotics.com/","url":"https://t.co/7vEa4Ju9A1","indices":[2859,2882]}],"user_mentions":[{"id_str":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","indices":[763,779]},{"id_str":"755183838532370432","name":"1X","screen_name":"1x_tech","indices":[1631,1639]},{"id_str":"2309105822","name":"Eric Jang","screen_name":"ericjang11","indices":[1809,1820]},{"id_str":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","indices":[2078,2087]},{"id_str":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","indices":[2396,2408]},{"id_str":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","indices":[2519,2532]},{"id_str":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","indices":[2594,2607]},{"id_str":"1262880841769684992","name":"Archer","screen_name":"ArcherAviation","indices":[2677,2692]},{"id_str":"1444769514","name":"corey lynch","screen_name":"corelynch","indices":[2722,2732]},{"id_str":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","indices":[2884,2898]},{"id_str":"1244939741767897089","name":"Necromancer","screen_name":"dhanushisrad","indices":[3035,3048]}]},"extended_entities":{"media":[{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695168808229687303","indices":[282,305],"media_key":"3_1695168808229687303","media_url_https":"https://pbs.twimg.com/media/F4ZzDLjaUAczB3l.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":500,"w":1200,"resize":"fit"},"medium":{"h":500,"w":1200,"resize":"fit"},"small":{"h":283,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":500,"width":1200,"focus_rects":[{"x":307,"y":0,"w":893,"h":500},{"x":700,"y":0,"w":500,"h":500},{"x":761,"y":0,"w":439,"h":500},{"x":925,"y":0,"w":250,"h":500},{"x":0,"y":0,"w":1200,"h":500}]},"media_results":{"result":{"media_key":"3_1695168808229687303"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175793201270788","indices":[282,305],"media_key":"3_1695175793201270788","media_url_https":"https://pbs.twimg.com/media/F4Z5ZwmaUAQRjyr.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":534,"w":950,"resize":"fit"},"medium":{"h":534,"w":950,"resize":"fit"},"small":{"h":382,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":534,"width":950,"focus_rects":[{"x":0,"y":0,"w":950,"h":532},{"x":183,"y":0,"w":534,"h":534},{"x":216,"y":0,"w":468,"h":534},{"x":317,"y":0,"w":267,"h":534},{"x":0,"y":0,"w":950,"h":534}]},"media_results":{"result":{"media_key":"3_1695175793201270788"}}},{"display_url":"pic.x.com/AiJC0fKnJV","expanded_url":"https://x.com/xiao_ted/status/1695187278929481844/photo/1","id_str":"1695175747772764162","indices":[282,305],"media_key":"3_1695175747772764162","media_url_https":"https://pbs.twimg.com/media/F4Z5XHXaUAI33jK.jpg","type":"photo","url":"https://t.co/AiJC0fKnJV","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"},{"user_id":"2309105822","name":"Eric Jang","screen_name":"ericjang11","type":"user"},{"user_id":"755183838532370432","name":"1X","screen_name":"1x_tech","type":"user"},{"user_id":"114088702","name":"Julian Ibarz","screen_name":"julianibarz","type":"user"},{"user_id":"3222018178","name":"Brett Adcock","screen_name":"adcock_brett","type":"user"},{"user_id":"1450806886899531787","name":"Clone","screen_name":"clonerobotics","type":"user"},{"user_id":"907134826137788416","name":"Unitree","screen_name":"UnitreeRobotics","type":"user"},{"user_id":"19658565","name":"Corey Lynch","screen_name":"coreylynch","type":"user"},{"user_id":"1602443956888817665","name":"Figure","screen_name":"Figure_robot","type":"user"},{"user_id":"1659653864138612761","name":"Tesla AI","screen_name":"Tesla_AI","type":"user"}]},"large":{"faces":[]},"medium":{"faces":[]},"small":{"faces":[]},"orig":{"faces":[]}},"sizes":{"large":{"h":526,"w":1080,"resize":"fit"},"medium":{"h":526,"w":1080,"resize":"fit"},"small":{"h":331,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":526,"width":1080,"focus_rects":[{"x":71,"y":0,"w":939,"h":526},{"x":277,"y":0,"w":526,"h":526},{"x":310,"y":0,"w":461,"h":526},{"x":409,"y":0,"w":263,"h":526},{"x":0,"y":0,"w":1080,"h":526}]},"media_results":{"result":{"media_key":"3_1695175747772764162"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1695187278929481844","view_count":233579,"bookmark_count":308,"created_at":1692999117000,"favorite_count":441,"quote_count":22,"reply_count":13,"retweet_count":93,"user_id_str":"1976589691","conversation_id_str":"1695187278929481844","full_text":"🚨Big things are happening in humanoid robotics!🚨\n\nAs we saw with drones and quadruped robots, it can take a mere decade for bleeding edge R&D areas to become \"solved\" platforms for commercial consumer use cases. Once open-ended research questions around reliability, dexterity, and cost have all been answered in a resounding fashion. Today, you can take your pick of low-cost stable consumer options that may have been impossible to imagine just 10 years ago.\n\nAnd now, the writing is on the wall: the next few years will be transformative in bringing general-purpose humanoids from small scale proof-of-concept demos (ie. Atlas in the 2010s) to truly mature products available at scale.\n\n2 notable recent announcements:\n\n- Unitree H1 (https://t.co/00HF931Q30). @UnitreeRobotics did for quadrupeds what DJI did for drones. Absolutely believable that Unitree can run it back and disrupt a new form of robots.\n\n- AgiBot RAISE-A1 (https://t.co/lsVHl8ht90).\nIn case you aren't familiar with the founder 稚晖君 (Peng Zhihui), he is a legit 100x Engineer that recently left Huawei's prestigious \"Youth Genius\" program to start his own company, AgiBot. I've been following his amazing YouTube (https://t.co/o6uPZu3ZH4) for a while now, and the proof is in the pudding: it seems that Peng is now only able to hack on full-stack robotics side projects, but also ship a real production robot. From inception to an on-stage demo of self-powered bipedal locomotion without support, it took less than 6 months. \n\nThese recent entrants join other humanoid players that I'm also particularly excited by:\n\n- 1X EVE and NEO (https://t.co/Q8eqlN2POp)\n@1x_tech is well-positioned with a large head-start in building out an already impressive hardware platform and the buy-in of OpenAI. The long-term AI vision is led by my friend @ericjang11, whose prescient insight around generative modeling, imitation learning, and language-conditioning has influenced many research efforts to scale up smart robots, including those of my own team at Google DeepMind.\n\n- Tesla Optimus (https://t.co/kaKuHlVdiZ)\n@Tesla_AI impressed robotics experts with how quickly they went from marketing pitch to live hardware demo in less than a year. Once they reach some technological maturity, there are clear synergies with their existing supply chain and distribution know-how. The manipulation R&D efforts are in good hands (haha) with @julianibarz, my old manager responsible for creating the famous \"Google Arm Farm\"!\n\n- Figure 01 (https://t.co/aKwEpLMUg9)\n@Figure_robot is one of the best-funded players led by a superstar founder @adcock_brett, who has a proven track record of shipping hard tech products (prev. @ArcherAviation). Long-term AI vision led by @corelynch, my old colleague whose keen research insight created a new subfield of learning from unstructured robot play data.\n\n- Clone (https://t.co/7vEa4Ju9A1)\n@clonerobotics is taking a unique approach with bio-memetic musculoskeletal humanoids. Big bet to swing for the fences, and led by the extremely sharp @dhanushisrad. When everyone else zigs, Clone zags.\n\nThere are a ton more cool humanoid efforts but these are the ones that I'm particularly excited by, thanks to their focus on building the Robot Brain and not just the Robot Body! Embodied AI is one of the most exciting challenges of our lifetimes, and I'm exceedingly optimistic about building it.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,275],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/5cda2pra9s","expanded_url":"https://twitter.com/xiao_ted/status/1613657870918381568/photo/1","id_str":"1613652811077812224","indices":[276,299],"media_key":"16_1613652811077812224","media_url_https":"https://pbs.twimg.com/tweet_video_thumb/FmTYrqMagAA2EmH.jpg","type":"animated_gif","url":"https://t.co/5CdA2Pra9s","ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":360,"w":640,"resize":"fit"},"medium":{"h":360,"w":640,"resize":"fit"},"small":{"h":360,"w":640,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":360,"width":640,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"variants":[{"bitrate":0,"content_type":"video/mp4","url":"https://video.twimg.com/tweet_video/FmTYrqMagAA2EmH.mp4"}]},"media_results":{"result":{"media_key":"16_1613652811077812224"}}}],"symbols":[],"timestamps":[],"urls":[{"display_url":"github.com/Rolv-Arild/Nec…","expanded_url":"https://github.com/Rolv-Arild/Necto","url":"https://t.co/DhBX3RjT5n","indices":[176,199]}],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/5cda2pra9s","expanded_url":"https://twitter.com/xiao_ted/status/1613657870918381568/photo/1","id_str":"1613652811077812224","indices":[276,299],"media_key":"16_1613652811077812224","media_url_https":"https://pbs.twimg.com/tweet_video_thumb/FmTYrqMagAA2EmH.jpg","type":"animated_gif","url":"https://t.co/5CdA2Pra9s","ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":360,"w":640,"resize":"fit"},"medium":{"h":360,"w":640,"resize":"fit"},"small":{"h":360,"w":640,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":360,"width":640,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"variants":[{"bitrate":0,"content_type":"video/mp4","url":"https://video.twimg.com/tweet_video/FmTYrqMagAA2EmH.mp4"}]},"media_results":{"result":{"media_key":"16_1613652811077812224"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1613657870918381568","view_count":129503,"bookmark_count":139,"created_at":1673560991000,"favorite_count":618,"quote_count":10,"reply_count":11,"retweet_count":94,"user_id_str":"1976589691","conversation_id_str":"1613657870918381568","full_text":"🚨New RL impact just dropped🚨\n\n1) My friend is a high level Rocket League player and just alerted me that an open-sourced agent trained with reinforcement learning + self play (https://t.co/DhBX3RjT5n) has been steamrolling on public servers! It's in the top 0.5% ELO bracket. https://t.co/5CdA2Pra9s","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,196],"entities":{"hashtags":[{"indices":[22,31],"text":"ICRA2024"}],"media":[{"display_url":"pic.x.com/xfaopdqmx1","expanded_url":"https://twitter.com/xiao_ted/status/1789936078842945832/photo/1","id_str":"1789936066251931648","indices":[197,220],"media_key":"3_1789936066251931648","media_url_https":"https://pbs.twimg.com/media/GNchXmebQAACX0G.jpg","type":"photo","url":"https://t.co/xfAopDQMX1","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[{"x":1756,"y":1120,"h":70,"w":70},{"x":1476,"y":1130,"h":66,"w":66},{"x":816,"y":1246,"h":82,"w":82}]},"medium":{"faces":[{"x":1028,"y":656,"h":41,"w":41},{"x":864,"y":662,"h":38,"w":38},{"x":478,"y":730,"h":48,"w":48}]},"small":{"faces":[{"x":583,"y":371,"h":23,"w":23},{"x":490,"y":375,"h":21,"w":21},{"x":270,"y":413,"h":27,"w":27}]},"orig":{"faces":[{"x":1756,"y":1120,"h":70,"w":70},{"x":1476,"y":1130,"h":66,"w":66},{"x":816,"y":1246,"h":82,"w":82}]}},"sizes":{"large":{"h":1630,"w":2048,"resize":"fit"},"medium":{"h":955,"w":1200,"resize":"fit"},"small":{"h":541,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1630,"width":2048,"focus_rects":[{"x":0,"y":483,"w":2048,"h":1147},{"x":0,"y":0,"w":1630,"h":1630},{"x":0,"y":0,"w":1430,"h":1630},{"x":155,"y":0,"w":815,"h":1630},{"x":0,"y":0,"w":2048,"h":1630}]},"media_results":{"result":{"media_key":"3_1789936066251931648"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.twitter.com/xfAopDQMX1","expanded_url":"https://twitter.com/xiao_ted/status/1789936078842945832/photo/1","id_str":"1789936066251931648","indices":[197,220],"media_key":"3_1789936066251931648","media_url_https":"https://pbs.twimg.com/media/GNchXmebQAACX0G.jpg","type":"photo","url":"https://t.co/xfAopDQMX1","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[{"x":1756,"y":1120,"h":70,"w":70},{"x":1476,"y":1130,"h":66,"w":66},{"x":816,"y":1246,"h":82,"w":82}]},"medium":{"faces":[{"x":1028,"y":656,"h":41,"w":41},{"x":864,"y":662,"h":38,"w":38},{"x":478,"y":730,"h":48,"w":48}]},"small":{"faces":[{"x":583,"y":371,"h":23,"w":23},{"x":490,"y":375,"h":21,"w":21},{"x":270,"y":413,"h":27,"w":27}]},"orig":{"faces":[{"x":1756,"y":1120,"h":70,"w":70},{"x":1476,"y":1130,"h":66,"w":66},{"x":816,"y":1246,"h":82,"w":82}]}},"sizes":{"large":{"h":1630,"w":2048,"resize":"fit"},"medium":{"h":955,"w":1200,"resize":"fit"},"small":{"h":541,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1630,"width":2048,"focus_rects":[{"x":0,"y":483,"w":2048,"h":1147},{"x":0,"y":0,"w":1630,"h":1630},{"x":0,"y":0,"w":1430,"h":1630},{"x":155,"y":0,"w":815,"h":1630},{"x":0,"y":0,"w":2048,"h":1630}]},"media_results":{"result":{"media_key":"3_1789936066251931648"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1789936078842945832","view_count":12094,"bookmark_count":18,"created_at":1715588991000,"favorite_count":74,"quote_count":2,"reply_count":10,"retweet_count":14,"user_id_str":"1976589691","conversation_id_str":"1789936078842945832","full_text":"Great debate today at #ICRA2024 on “Generative AI will make a lot of traditional robotics approaches obsolete\"! \n\nBut I suspect 57% of the room will be very shocked/unhappy over the next 5 years 🙃 https://t.co/xfAopDQMX1","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,250],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","retweeted":false,"fact_check":null,"id":"1910442576500711722","view_count":6239,"bookmark_count":8,"created_at":1744319979000,"favorite_count":21,"quote_count":0,"reply_count":10,"retweet_count":3,"user_id_str":"1976589691","conversation_id_str":"1910442576500711722","full_text":"Vibe check:\n\nAny behavior which a human can teleoperate a robot to do, an end-to-end policy can be learned. That is, for *any* initial condition which a human can successfully teleoperate from, an automated policy can match in performance/robustness.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"display_text_range":[0,161],"lang":"en","quoted_tweet":{"id":"2019488071134347605","text":"We worked with @Ginkgo to connect GPT-5 to an autonomous lab, so it could propose experiments, run them at scale, learn from the results, and decide what to try next. That closed loop brought protein production cost down by 40%. https://t.co/udKBKxnKlW","full_text":"We worked with @Ginkgo to connect GPT-5 to an autonomous lab, so it could propose experiments, run them at scale, learn from the results, and decide what to try next. That closed loop brought protein production cost down by 40%. https://t.co/udKBKxnKlW","created_at":1770318451000,"author_id":"4398626122","author":{"id":"4398626122","name":"OpenAI","username":"OpenAI","screen_name":"OpenAI","profile_image_url":"https://pbs.twimg.com/profile_images/1885410181409820672/ztsaR0JW_400x400.jpg","profile_image_url_https":"https://pbs.twimg.com/profile_images/1885410181409820672/ztsaR0JW_400x400.jpg","is_blue_verified":1},"public_metrics":{"like_count":9696,"retweet_count":1265,"reply_count":467,"quote_count":653}},"fact_check":null,"id":"2019559078918537701","view_count":12877,"bookmark_count":18,"created_at":1770335380000,"favorite_count":136,"quote_count":3,"reply_count":10,"retweet_count":5,"user_id_str":"1976589691","conversation_id_str":"2019559078918537701","full_text":"humanoid is robot\nvacuum is robot\ncar is robot\nspace rocket is robot\nlab is robot\nwarehouse is robot\nfactory is robot\n\nat the end of the day, everything is robot","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":1,"is_ai":null,"ai_score":null,"source":"rapidapi","fetched_at":1774573744555,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":1770595217308,"poll_count":1,"poll_complete":1},{"bookmarked":false,"display_text_range":[0,127],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","retweeted":false,"fact_check":null,"id":"1989955574277230927","view_count":7063,"bookmark_count":4,"created_at":1763277355000,"favorite_count":45,"quote_count":0,"reply_count":9,"retweet_count":1,"user_id_str":"1976589691","conversation_id_str":"1989955574277230927","full_text":"Visiting Zurich🇨🇭 this week! Would love to learn what researchers in AI and robotics are excited about. Who should I chat with?","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"display_text_range":[0,280],"lang":"en","fact_check":null,"id":"2029346532387123276","view_count":18451,"bookmark_count":111,"created_at":1772668891000,"favorite_count":254,"quote_count":0,"reply_count":9,"retweet_count":9,"user_id_str":"1976589691","conversation_id_str":"2029346532387123276","full_text":"I’ve been building something new at Project Prometheus these past few months. General AI for the physical world is the defining problem of our time, and the founding team is absurdly strong and moving fast. We’re hiring in SF/London/Zurich for real-world ML generalists. DMs open.","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"rapidapi","fetched_at":1774573744555,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":1772931601465,"poll_count":1,"poll_complete":1},{"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/GJ4hsb5Luq","expanded_url":"https://x.com/xiao_ted/status/2031856423609696637/photo/1","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[]},"medium":{"faces":[]},"orig":{"faces":[]},"small":{"faces":[]}},"id_str":"2031856419818086400","indices":[41,64],"media_key":"3_2031856419818086400","media_results":{"result":{"media_key":"3_2031856419818086400"}},"media_url_https":"https://pbs.twimg.com/media/HDKapgnaoAAif4b.jpg","original_info":{"focus_rects":[{"h":305,"w":544,"x":0,"y":0},{"h":500,"w":500,"x":35,"y":0},{"h":500,"w":439,"x":66,"y":0},{"h":500,"w":250,"x":160,"y":0},{"h":500,"w":544,"x":0,"y":0}],"height":500,"width":544},"sizes":{"large":{"h":500,"resize":"fit","w":544},"medium":{"h":500,"resize":"fit","w":544},"small":{"h":500,"resize":"fit","w":544},"thumb":{"h":150,"resize":"crop","w":150}},"type":"photo","url":"https://t.co/GJ4hsb5Luq"}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/GJ4hsb5Luq","expanded_url":"https://x.com/xiao_ted/status/2031856423609696637/photo/1","ext_media_availability":{"status":"Available"},"features":{"large":{"faces":[]},"medium":{"faces":[]},"orig":{"faces":[]},"small":{"faces":[]}},"id_str":"2031856419818086400","indices":[41,64],"media_key":"3_2031856419818086400","media_results":{"result":{"media_key":"3_2031856419818086400"}},"media_url_https":"https://pbs.twimg.com/media/HDKapgnaoAAif4b.jpg","original_info":{"focus_rects":[{"h":305,"w":544,"x":0,"y":0},{"h":500,"w":500,"x":35,"y":0},{"h":500,"w":439,"x":66,"y":0},{"h":500,"w":250,"x":160,"y":0},{"h":500,"w":544,"x":0,"y":0}],"height":500,"width":544},"sizes":{"large":{"h":500,"resize":"fit","w":544},"medium":{"h":500,"resize":"fit","w":544},"small":{"h":500,"resize":"fit","w":544},"thumb":{"h":150,"resize":"crop","w":150}},"type":"photo","url":"https://t.co/GJ4hsb5Luq"}]},"display_text_range":[0,40],"lang":"en","possibly_sensitive":false,"fact_check":null,"id":"2031856423609696637","view_count":27330,"bookmark_count":24,"created_at":1773267296000,"favorite_count":131,"quote_count":12,"reply_count":9,"retweet_count":15,"user_id_str":"1976589691","conversation_id_str":"2031856423609696637","full_text":"live look at the robotics + AI landscape https://t.co/GJ4hsb5Luq","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"rapidapi","fetched_at":1774573744555,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":1773529209055,"poll_count":1,"poll_complete":1},{"bookmarked":false,"display_text_range":[0,293],"entities":{"hashtags":[],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"favorited":false,"lang":"en","quoted_status_id_str":"1795477359933706272","quoted_status_permalink":{"url":"https://t.co/cOZk3bnWJk","expanded":"https://twitter.com/khoomeik/status/1795477359933706272","display":"x.com/khoomeik/statu…"},"retweeted":false,"fact_check":null,"id":"1796215608297894070","view_count":18376,"bookmark_count":24,"created_at":1717086147000,"favorite_count":116,"quote_count":1,"reply_count":8,"retweet_count":8,"user_id_str":"1976589691","conversation_id_str":"1796215608297894070","full_text":"> year is 2031\n> be me, token farmer in the slop mines\n> bring in 20k novel tokens for weighing at the Token Utility station\n> my token haul is two stddevs over the compressibility threshold, phew\n> get my daily blueprint nutrition allocation\n> trickle down tokenomics utopia","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":1,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,277],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/kwaQ92yaM0","expanded_url":"https://x.com/xiao_ted/status/1872392627339116904/video/1","id_str":"1872392515107926016","indices":[278,301],"media_key":"13_1872392515107926016","media_url_https":"https://pbs.twimg.com/amplify_video_thumb/1872392515107926016/img/rGS-PzgdITLI9A66.jpg","type":"video","url":"https://t.co/kwaQ92yaM0","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":720,"w":1280,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":720,"width":1280,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":65789,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/amplify_video/1872392515107926016/pl/EWQJFoRA87aJU2wD.m3u8?tag=16&v=7cf"},{"bitrate":288000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1872392515107926016/vid/avc1/480x270/KyEAnSFWhtlYq5om.mp4?tag=16"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1872392515107926016/vid/avc1/640x360/q9B0n7qfr_vGTcZ6.mp4?tag=16"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1872392515107926016/vid/avc1/1280x720/whoHn_qapZyR44O5.mp4?tag=16"}]},"media_results":{"result":{"media_key":"13_1872392515107926016"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[]},"extended_entities":{"media":[{"display_url":"pic.x.com/kwaQ92yaM0","expanded_url":"https://x.com/xiao_ted/status/1872392627339116904/video/1","id_str":"1872392515107926016","indices":[278,301],"media_key":"13_1872392515107926016","media_url_https":"https://pbs.twimg.com/amplify_video_thumb/1872392515107926016/img/rGS-PzgdITLI9A66.jpg","type":"video","url":"https://t.co/kwaQ92yaM0","additional_media_info":{"monetizable":false},"ext_media_availability":{"status":"Available"},"sizes":{"large":{"h":720,"w":1280,"resize":"fit"},"medium":{"h":675,"w":1200,"resize":"fit"},"small":{"h":383,"w":680,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":720,"width":1280,"focus_rects":[]},"video_info":{"aspect_ratio":[16,9],"duration_millis":65789,"variants":[{"content_type":"application/x-mpegURL","url":"https://video.twimg.com/amplify_video/1872392515107926016/pl/EWQJFoRA87aJU2wD.m3u8?tag=16&v=7cf"},{"bitrate":288000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1872392515107926016/vid/avc1/480x270/KyEAnSFWhtlYq5om.mp4?tag=16"},{"bitrate":832000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1872392515107926016/vid/avc1/640x360/q9B0n7qfr_vGTcZ6.mp4?tag=16"},{"bitrate":2176000,"content_type":"video/mp4","url":"https://video.twimg.com/amplify_video/1872392515107926016/vid/avc1/1280x720/whoHn_qapZyR44O5.mp4?tag=16"}]},"media_results":{"result":{"media_key":"13_1872392515107926016"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1872392627339116904","view_count":14139,"bookmark_count":102,"created_at":1735248164000,"favorite_count":165,"quote_count":2,"reply_count":8,"retweet_count":18,"user_id_str":"1976589691","conversation_id_str":"1872392627339116904","full_text":"I’ve gradually come around to two paths to embodied AGI that I was very skeptical of before:\n1️⃣ solving robotics via reasoning\n2️⃣ solving robotics via world modeling\n\nI was previously doubtful not of these approaches themselves, but of timelines and efficiency; the “optimal” algorithms or approaches to use may not be the ones which make the most progress. Hardware and software lotteries are very real, especially in robotics where prohibitive CapEx and OpEx limit the search space of research ideas. So when trillions of dollars and millennia of R&D hours of effective investment have been poured into pre-training, scaling, and inference optimization for internet-scale LLMs, this is a powerful foundation to build off, and a very tough baseline ecosystem to beat — even if suboptimal for something like robotics.\n\nBut recent progress and momentum in reasoning and generative world modeling give me hope that we’ll see alternative approaches to unlocking general-purpose robotics, with competitive pace of progress! More entropy is better when we are still so early.\n\nTwo directions I would love to see more signals on in 2025:\n\n1️⃣ For reasoning / search-based models, to show that inference-time compute scaling can be amortized and distilled into training. While minutes (hours?!) of thinking processes might make sense in return for very strong results in coding or math, this is simply a non-starter in real world robotics. Additionally, I would love to see evidence of how well “thinking harder” improves physical embodied reasoning performance. The types of intelligence required for low-level control are very different than the types of intelligence required for solving math Olympiad problems or debugging large software codebases.\n\n2️⃣ For generative world modeling, to show that the important physical properties of the world are modeled in a non-trivial manner. Beyond basic concepts like object permanence or the forward arrow of time, how well do approaches like action-conditioned video prediction (which are generally optimized for *aesthetic reconstruction*, rather than physical grounding) capture the details of what’s important for robotic control? I would like to see how world models capture different behavior modes, capture different levels of optimality (model not only successful world interactions, but also failures), and different robot embodiments (assumptions valid in for a factory robot may be very bad for modeling home robots).\n\nThe future is bright! For both 1️⃣ and 2️⃣, progress is orders of magnitudes what we saw in 2023. Looking forward to an even more diverse and interesting 2025 ⭐️","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0},{"bookmarked":false,"display_text_range":[0,263],"entities":{"hashtags":[],"media":[{"display_url":"pic.x.com/xelgE2BlZr","expanded_url":"https://x.com/xiao_ted/status/1933210819455824101/photo/1","id_str":"1933210815630585856","indices":[264,287],"media_key":"3_1933210815630585856","media_url_https":"https://pbs.twimg.com/media/GtQk_oWasAAReTs.jpg","type":"photo","url":"https://t.co/xelgE2BlZr","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2244121213","name":"Chris Paxton","screen_name":"chris_j_paxton","type":"user"},{"user_id":"566094708","name":"Dhruv Shah","screen_name":"shahdhruv_","type":"user"},{"user_id":"141891924","name":"Michael Cho - Rbt/Acc","screen_name":"micoolcho","type":"user"},{"user_id":"1811128301764648960","name":"LeRobot","screen_name":"LeRobotHF","type":"user"},{"user_id":"1861258248483151874","name":"BitRobot Network","screen_name":"BitRobotNetwork","type":"user"},{"user_id":"1033541900035403777","name":"Jason Ma","screen_name":"JasonMa2020","type":"user"}]},"large":{"faces":[{"x":691,"y":1353,"h":81,"w":81},{"x":556,"y":1690,"h":66,"w":66},{"x":936,"y":1357,"h":81,"w":81},{"x":847,"y":1657,"h":79,"w":79},{"x":257,"y":1676,"h":99,"w":99},{"x":144,"y":1349,"h":118,"w":118}]},"medium":{"faces":[{"x":415,"y":814,"h":48,"w":48},{"x":334,"y":1017,"h":39,"w":39},{"x":563,"y":816,"h":48,"w":48},{"x":509,"y":997,"h":47,"w":47},{"x":154,"y":1008,"h":59,"w":59},{"x":86,"y":811,"h":71,"w":71}]},"small":{"faces":[{"x":235,"y":461,"h":27,"w":27},{"x":189,"y":576,"h":22,"w":22},{"x":319,"y":463,"h":27,"w":27},{"x":289,"y":565,"h":26,"w":26},{"x":87,"y":571,"h":33,"w":33},{"x":49,"y":460,"h":40,"w":40}]},"orig":{"faces":[{"x":691,"y":1353,"h":81,"w":81},{"x":556,"y":1690,"h":66,"w":66},{"x":936,"y":1357,"h":81,"w":81},{"x":847,"y":1657,"h":79,"w":79},{"x":257,"y":1676,"h":99,"w":99},{"x":144,"y":1349,"h":118,"w":118}]}},"sizes":{"large":{"h":1994,"w":1600,"resize":"fit"},"medium":{"h":1200,"w":963,"resize":"fit"},"small":{"h":680,"w":546,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1994,"width":1600,"focus_rects":[{"x":0,"y":0,"w":1600,"h":896},{"x":0,"y":0,"w":1600,"h":1600},{"x":0,"y":0,"w":1600,"h":1824},{"x":0,"y":0,"w":997,"h":1994},{"x":0,"y":0,"w":1600,"h":1994}]},"media_results":{"result":{"media_key":"3_1933210815630585856"}}}],"symbols":[],"timestamps":[],"urls":[],"user_mentions":[{"id_str":"1811128301764648960","name":"LeRobot","screen_name":"LeRobotHF","indices":[86,96]},{"id_str":"1861258248483151874","name":"BitRobot Network","screen_name":"BitRobotNetwork","indices":[234,250]}]},"extended_entities":{"media":[{"display_url":"pic.x.com/xelgE2BlZr","expanded_url":"https://x.com/xiao_ted/status/1933210819455824101/photo/1","id_str":"1933210815630585856","indices":[264,287],"media_key":"3_1933210815630585856","media_url_https":"https://pbs.twimg.com/media/GtQk_oWasAAReTs.jpg","type":"photo","url":"https://t.co/xelgE2BlZr","ext_media_availability":{"status":"Available"},"features":{"all":{"tags":[{"user_id":"2244121213","name":"Chris Paxton","screen_name":"chris_j_paxton","type":"user"},{"user_id":"566094708","name":"Dhruv Shah","screen_name":"shahdhruv_","type":"user"},{"user_id":"141891924","name":"Michael Cho - Rbt/Acc","screen_name":"micoolcho","type":"user"},{"user_id":"1811128301764648960","name":"LeRobot","screen_name":"LeRobotHF","type":"user"},{"user_id":"1861258248483151874","name":"BitRobot Network","screen_name":"BitRobotNetwork","type":"user"},{"user_id":"1033541900035403777","name":"Jason Ma","screen_name":"JasonMa2020","type":"user"}]},"large":{"faces":[{"x":691,"y":1353,"h":81,"w":81},{"x":556,"y":1690,"h":66,"w":66},{"x":936,"y":1357,"h":81,"w":81},{"x":847,"y":1657,"h":79,"w":79},{"x":257,"y":1676,"h":99,"w":99},{"x":144,"y":1349,"h":118,"w":118}]},"medium":{"faces":[{"x":415,"y":814,"h":48,"w":48},{"x":334,"y":1017,"h":39,"w":39},{"x":563,"y":816,"h":48,"w":48},{"x":509,"y":997,"h":47,"w":47},{"x":154,"y":1008,"h":59,"w":59},{"x":86,"y":811,"h":71,"w":71}]},"small":{"faces":[{"x":235,"y":461,"h":27,"w":27},{"x":189,"y":576,"h":22,"w":22},{"x":319,"y":463,"h":27,"w":27},{"x":289,"y":565,"h":26,"w":26},{"x":87,"y":571,"h":33,"w":33},{"x":49,"y":460,"h":40,"w":40}]},"orig":{"faces":[{"x":691,"y":1353,"h":81,"w":81},{"x":556,"y":1690,"h":66,"w":66},{"x":936,"y":1357,"h":81,"w":81},{"x":847,"y":1657,"h":79,"w":79},{"x":257,"y":1676,"h":99,"w":99},{"x":144,"y":1349,"h":118,"w":118}]}},"sizes":{"large":{"h":1994,"w":1600,"resize":"fit"},"medium":{"h":1200,"w":963,"resize":"fit"},"small":{"h":680,"w":546,"resize":"fit"},"thumb":{"h":150,"w":150,"resize":"crop"}},"original_info":{"height":1994,"width":1600,"focus_rects":[{"x":0,"y":0,"w":1600,"h":896},{"x":0,"y":0,"w":1600,"h":1600},{"x":0,"y":0,"w":1600,"h":1824},{"x":0,"y":0,"w":997,"h":1994},{"x":0,"y":0,"w":1600,"h":1994}]},"media_results":{"result":{"media_key":"3_1933210815630585856"}}}]},"favorited":false,"lang":"en","possibly_sensitive":false,"possibly_sensitive_editable":true,"retweeted":false,"fact_check":null,"id":"1933210819455824101","view_count":32962,"bookmark_count":11,"created_at":1749748351000,"favorite_count":91,"quote_count":3,"reply_count":8,"retweet_count":14,"user_id_str":"1976589691","conversation_id_str":"1933210819455824101","full_text":"The impact of accessible low-cost robot arms and the community that’s built up around @LeRobotHF has been so awesome to see! 🤖 🚀 \n\nI am honored to be a guest judge this weekend at the Global LeRobot hackathon’s SF location. Thanks to @BitRobotNetwork for hosting. https://t.co/xelgE2BlZr","in_reply_to_user_id_str":null,"in_reply_to_status_id_str":null,"is_quote_status":0,"is_ai":null,"ai_score":null,"source":"scraping","fetched_at":null,"edit_history_tweet_ids":null,"poll_10min_at":null,"poll_3day_at":null,"poll_count":0,"poll_complete":0}],"activities":null,"interactions":null,"interactions_updated":null,"created":1774578424196,"updated":1774578424196,"type":"the visionary","hits":1},"people":[{"user":{"id":"42226885","name":"Vinod Khosla","description":"entrepreneurship zealot, grounded technology possibilist, believer in the power of ideas, passionate about sustainability & impact","followers_count":678989,"friends_count":634,"statuses_count":9446,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1726662238046724096/VmfHT8C__normal.jpg","screen_name":"vkhosla","location":"","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"khoslaventures.com","expanded_url":"http://khoslaventures.com","indices":[0,23],"url":"https://t.co/3WUX2zGdJO"}]}}},"details":{"type":"The Visionary","description":"A hard-charging entrepreneurial visionary who believes bold ideas and technology can remake industries and rescue the planet. Outspoken on politics and climate, he pairs blunt takes with real-world action and capital. His feed is equal parts funding strategy, sustainability urgency, and mobilizing calls-to-action.","purpose":"To accelerate transformational technologies and investments that create large-scale, lasting impact—especially on climate and sustainability—while using his voice and capital to hold leaders and systems to account.","beliefs":"Deep faith in entrepreneurship, technological possibility, and the power of ideas to solve systemic problems; integrity and values matter as much as outcomes; responsibility to use wealth and influence for public good and crisis relief.","facts":"Fun fact: nearly 679K followers and ~9.4K tweets; one tweet reached ~14.7M views with 94K likes. He publicly offered to fund urgent medical supplies to India during COVID, showing his voice is matched by financial muscle.","strength":"Bold clarity of vision, vast network and capital, ability to mobilize resources and people, credibility in tech and climate circles, and a knack for turning high-level ideas into funded action.","weakness":"Blunt, polarizing tone that can alienate potential allies; tendency to tweet heated, black-or-white judgments that can overshadow nuance; risks burning bridges when bluntness becomes personal.","recommendation":"Leverage your reputation with high-value content: regular data-backed threads on climate tech, short video explainers, and case studies of investments that mattered. Host X Spaces and AMAs with scientists and founders, pin a clear climate/impact manifesto, collaborate with complementary influencers, and use targeted ads to boost key threads. Tone down one-liners when seeking coalition-building—fact-first, invitation-second wins wider support.","roast":"You build billion-dollar visions by day and launch rhetorical grenades by night—proving you can both fund the future and start a Twitter civil war before breakfast.","win":"Turning early, visionary bets into industry-shaping companies while using personal resources to fund urgent COVID relief and consistently pushing climate tech into the mainstream conversation."},"created":1774578306939,"type":"the visionary","id":"vkhosla"},{"user":{"id":"131307382","name":"Trae Stephens","description":"Partner, Founders Fund; Co-Founder, Anduril; Co-Founder, Sol","followers_count":46158,"friends_count":1276,"statuses_count":2875,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1945468820946128896/AyfKJLMi_normal.jpg","screen_name":"traestephens","location":"San Francisco, CA","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"foundersfund.com","expanded_url":"http://www.foundersfund.com","indices":[0,23],"url":"https://t.co/xQETJz6aPX"}]}}},"details":{"type":"The Visionary","description":"A no-nonsense builder and investor who moves between Silicon Valley, Washington, and the defense world with equal comfort. Co-founder of Anduril and partner at Founders Fund, he shapes conversations on technology, national power, and where ambitious talent should live. His tweets land like briefing notes — blunt, directional, and unapologetically American.","purpose":"To build and fund technologies and organizations that shift the balance of power, protect national interests, and catalyze new industries — while steering talent and capital to where they have the most strategic impact.","beliefs":"Believes in American exceptionalism in tech and defense, meritocratic concentration of talent in a few power centers, bold decision-making over endless deliberation, and that building practical tools matters more than theory. Values directness, decisive action, and measurable outcomes.","facts":"Fun fact: his controversial thread declaring there are only four U.S. tier-1 cities drew over 3 million views — proof he doesn't just talk, he provokes. Profile highlights: Partner at Founders Fund; Co-founder of Anduril and Sol; ~46k followers and ~2.9k tweets — a loud, influential voice at the intersection of venture, defense, and culture.","strength":"Decisive, credible founder-investor with deep networks in tech and national security; clear, punchy messaging that commands attention; ability to move capital and talent to execute big bets.","weakness":"Tends to be polarizing and blunt, which can alienate potential allies; strong convictions sometimes read as dismissive of nuance; a preference for binary takes over subtle engagement can amplify controversy.","roast":"Buys the future of autonomous defense systems and then tweets like he’s handing out city rankings at a high school reunion — loud, confident, and still offended if you went to the wrong college.","win":"Co-founding Anduril and turning it into a leading defense-tech company that reframed how Silicon Valley builds for national security — a rare blend of startup speed and strategic impact.","recommendation":"Lean into short, high-value threads that mix technical insight, behind-the-scenes founder stories, and clear calls-to-action; pin a flagship thread explaining Anduril’s mission and investment thesis; host occasional X Spaces with policymakers and engineers to broaden credibility; use video clips from demos and site visits to turn attention into trust; and when you drop a contrarian take, follow it with a calm explainer thread so your signal converts followers into advocates rather than just sparks."},"created":1774578190036,"type":"the visionary","id":"traestephens"},{"user":{"id":"1023014000","name":"Toby Pohlen","description":"Sleeping. Previously founding team @xAI, engineer @GoogleDeepMind. @RWTH alumnus.","followers_count":87744,"friends_count":605,"statuses_count":895,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1848762733732253696/S1aucmiu_normal.jpg","screen_name":"TobyPhln","location":"London, UK","entities":{"description":{"urls":[]}}},"details":{"type":"The Visionary","description":"Toby Pohlen is an engineering-first AI visionary who helped build xAI from the ground up and previously shipped research at Google DeepMind. He values clean execution over meetings, loves shipping product perfection, and is currently prioritizing the radical act of getting eight hours of sleep. His feed mixes mission-level thinking about 'understanding the universe' with sharp, practical notes for builders.","purpose":"To build powerful AI tools that advance human understanding and to turn ambitious, universe-sized ideas into well-engineered, shipped products that actually help people learn and do more.","beliefs":"Believes in ruthless focus on execution, minimal internal politics, engineering rigor, and that AI should expand human knowledge rather than just automate tasks. Trusts shipping and feedback over endless discussion.","facts":"Bio literally says 'Sleeping.' — after three years and thousands of PRs Toby left xAI and is prioritizing sleep, reflection, and capturing lessons learned. RWTH alumnus, ex-Google DeepMind engineer, founding team @xAI, ~87.7k followers, ~895 tweets.","strength":"Exceptional at shipping complex engineering work, setting and defending a crisp mission, attracting top talent and attention, and distilling big ideas into pithy, high-impact tweets.","weakness":"Perfectionism and extreme focus can lead to burnout (hence the sleep subplot), occasional terseness that can alienate non-engineer audiences, and a tendency to prioritize code over community-building rituals.","roast":"Toby's bio reads 'Sleeping.' — the most honest product roadmap I've seen: feature backlog, sprint planning, and now finally shipping 8 hours of sleep. Don't worry — he'll ship the nap in v2.0 with better docs.","win":"Built and shipped at the founding team level of xAI, contributed thousands of PRs, helped shape an audacious mission ('understand the universe'), and converted that credibility into a ~87k-strong audience.","recommendation":"To grow on X, lean into short technical threads and 'lessons learned' posts from your thousand-PR journey (pin one). Mix one deep thread/week (design decisions, postmortems) with casual takes and hiring posts. Use behind-the-scenes clips or diagrams, host occasional Spaces/AMAs to convert passive followers to engaged fans, and retweet/quote key community replies to reward contributors — all while batching drafts so you can actually keep sleeping."},"created":1774578133787,"type":"the visionary","id":"tobyphln"},{"user":{"id":"20884310","name":"Tim Draper","description":"Backing the bold ideas that shape the future. Founder of @DFJvc, @drapervc, @Draper_U, @meetthedrapers.\n\nPitch me: timdraper@draper.vc","followers_count":299541,"friends_count":2373,"statuses_count":3282,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1941469877463666688/aOgO-tBD_normal.jpg","screen_name":"TimDraper","location":"Menlo Park, CA","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"draper.vc","expanded_url":"https://draper.vc","indices":[0,23],"url":"https://t.co/R5QEYPkOSQ"}]}}},"details":{"type":"The Visionary","description":"Serial venture capitalist and unapologetic futurist who backs bold, borderless ideas — from startups to Bitcoin. Founder of DFJ, Draper University, and Meet the Drapers, Tim mixes grand optimism with blunt takes that get people talking.","facts":"Fun fact: Tim has publicly donated to and endorsed candidates from both major U.S. parties to stay close to decision-makers — and yes, he once declared “Gold is dead” while evangelizing Bitcoin.","purpose":"To fund and accelerate transformational technologies and founders that reshape industries and expand individual freedom — whether through decentralization, education, or bold policy bets.","beliefs":"He believes in entrepreneurial freedom, low barriers to innovation, decentralization (especially crypto), market incentives for long-term value creation, and the power of bold, contrarian bets to move the world forward.","strength":"Big-picture thinker with deep capital and an enormous network; comfortable making provocative, attention-grabbing statements; proven track record founding VCs, a university for founders, and media that amplifies startups.","weakness":"Can be polarizing and occasionally tactless on sensitive topics, which fuels backlash; a tendency to reduce complex issues to punchy one-liners that alienate some audiences.","recommendation":"Build structured content pillars: short video explainers on crypto and startup economics, regular founder highlight threads, and behind-the-scenes look at investments. Use Twitter Spaces/AMAs to convert skeptics, pin a recurring educational thread, engage selectively with high-value replies, and pair bold commentary with context so controversy drives curiosity instead of cancellations. Collaborate with founders and creators for cross-pollination and use short clips to drive followers to longer-form content off-platform.","roast":"You back both candidates because why pick a single inauguration party when you can VIP-pass both? Tim treats politics like portfolio diversification — just hope the dividends come with better PR than your occasional hot takes.","win":"Built a cross-generational venture platform (DFJ/Draper VC), launched Draper University and Meet the Drapers, and became an early, loud evangelist for Bitcoin — turning bold bets into influential platforms and a nearly 300k-strong audience on X."},"created":1774578108129,"type":"the visionary","id":"timdraper"},{"user":{"id":"14130366","name":"Sundar Pichai","description":"CEO, Google and Alphabet","followers_count":6103273,"friends_count":189,"statuses_count":2655,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1710036756731510784/FyfFgM-B_normal.jpg","screen_name":"sundarpichai","location":"","entities":{"description":{"urls":[]}}},"details":{"type":"The Visionary","description":"Sundar Pichai, CEO of Google and Alphabet, is a calm, big-picture leader whose occasional posts pack enormous reach and resonance. He blends product-first thinking with personal touches—cheering on Team India, celebrating space milestones, and noting global search trends. Quiet but impactful: when he speaks, millions listen.","purpose":"To steer technology toward useful, widely accessible innovation—building products and platforms that empower billions, connect communities, and push the boundaries of what information and computing can do for humanity.","beliefs":"Believes in long-term product thinking, user-first design, inclusive global opportunity, collaboration across cultures and teams, and using technology as a force for positive societal impact.","facts":"Fun fact: With just ~2,655 tweets but 6.1M followers, his posts routinely generate huge engagement—proving he doesn't need to tweet often to break the internet. Top tweets show a mix of national pride (cricket, Chandrayaan3), celebration of milestones (FIFA search spikes), and warm holiday notes (Diwali).","strength":"Strategic vision, credibility, calm communicator, ability to unify engineers and public audiences, knack for turning big moments into simple, shareable messages that scale globally.","weakness":"Tends to be cautious and corporate in tone, tweets infrequently which limits sustained algorithmic reach, and can come across as reserved rather than personally relatable.","recommendation":"Post more regularly with a mix of short personal moments and concise thought-leadership threads. Use video clips or voice notes to add warmth, host occasional X Spaces with engineers or partners, pin a short thread outlining product vision, engage selectively in replies to humanize the feed, and tweet in timely moments (sports, science, launches) with local-language shoutouts to grow Indian and global audiences.","roast":"You have 6.1 million followers but tweet so rarely that when you do, it feels like spotting Halley's Comet—beautiful, historic, and everyone takes a selfie with it. Try not to treat your feed like a company memo archive.","win":"Rising to CEO of Google and Alphabet and guiding products and platforms that touch billions—plus presiding over moments when global search hit all-time records and celebrating landmark achievements like Chandrayaan-3 with a nation."},"created":1774577998981,"type":"the visionary","id":"sundarpichai"},{"user":{"id":"952921795316912133","name":"Stani.eth","description":"Founder & CEO @Aave","followers_count":294837,"friends_count":5610,"statuses_count":5717,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1980627311545253888/CG5sIYHu_normal.jpg","screen_name":"StaniKulechov","location":"","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"aave.com","expanded_url":"http://aave.com","indices":[0,23],"url":"https://t.co/MGMGcVnYQA"}]}}},"details":{"type":"The Visionary","description":"Founder & CEO of Aave who builds permissionless rails for the next-generation internet and isn't afraid to call out bad policy. Data-driven, community-first, and always thinking several protocol-iterations ahead.","purpose":"To decentralize financial infrastructure and the social layer of the web, empowering users with resilient, permissionless systems that scale trustless interactions and human connection.","beliefs":"Believes in open, permissionless finance, transparency, and engineering-first solutions; trusts markets and on-chain data over opaque off-chain systems; favors user sovereignty but recognizes the need for smarter guardrails to protect users without sacrificing decentralization.","facts":"Fun fact: Stani.eth once pledged to return $600K in fees after a $50M swap produced extreme slippage; presides over Aave’s $75B+ lending ecosystem which automatically liquidated $180M in collateral during a single stress test; 294,837 followers and 5,717 tweets.","strength":"Clear technical credibility, crisis leadership, strong community trust, and the ability to turn complex on-chain events into teachable, actionable narratives that rally developers and users.","weakness":"Tends to be blunt—which sparks intense debate and reply storms; can lean heavily on permissionless ideology even when UX guardrails are needed; occasionally invites regulatory heat by publicly challenging authorities.","roast":"You preach permissionless finance like it’s a religion—charmingly heroic until someone swaps $50M and you have to play saint with a $600K IOU. Still, at least your refunds have better PR than most protocols’ audits.","win":"Led Aave through a record stress test where the protocol automatically liquidated $180M of collateral in one hour with no human intervention—proof that the system works under pressure.","recommendation":"Grow on X by combining technical credibility with storytelling: tweet short data-driven threads and post-mortems (with charts) explaining on-chain events; host regular Twitter Spaces for AMAs and policy pushbacks; pin high-value explainers and roadmap threads; spotlight community projects and Lens integrations to expand the network; use polls and CTAs to turn followers into contributors rather than just spectators."},"created":1774577958472,"type":"the visionary","id":"stanikulechov"},{"user":{"id":"46238620","name":"Sergey Nazarov","description":"Co-founder of @Chainlink: industry-standard for creating the verifiable web and bringing the whole world onchain. We're Hiring: https://t.co/0xiQfsV9Sz","followers_count":185609,"friends_count":48,"statuses_count":936,"profile_image_url_https":"https://pbs.twimg.com/profile_images/751118197126991873/eSXubsCD_normal.jpg","screen_name":"SergeyNazarov","location":"","entities":{"description":{"urls":[{"display_url":"chainlinklabs.com/careers","expanded_url":"http://chainlinklabs.com/careers","indices":[128,151],"url":"https://t.co/0xiQfsV9Sz"}]},"url":{"urls":[{"display_url":"chain.link","expanded_url":"https://chain.link/","indices":[0,23],"url":"https://t.co/uJ3rrkzUos"}]}}},"details":{"type":"The Visionary","description":"Co-founder of Chainlink who talks big-picture about bringing the world onchain and building the verifiable web. A founder who straddles deep technical thinking and high-level policy influence, often showing up where tech meets government. Communicates a future where institutions, regulators and blockchains all interoperate securely.","purpose":"To architect the infrastructure that makes off-chain data trustworthy on-chain, accelerate institutional adoption of blockchain technology, and rewire legacy financial systems so global value flows become verifiable, programmable and interoperable.","beliefs":"Believes in secure, reliable oracle infrastructure, the power of standards to scale technology, collaboration between industry and regulators, and that the path to mass adoption runs through institutions and clear policy. Values long-term systemic thinking over short-term hype.","facts":"Fun fact: Sergey has ~185k followers but follows only 48 accounts — extremely selective curation. He mixes technical visions with moments of philosophy (he once tweeted a Pythagoras quote about self-mastery), and he’s publicly engaged at high-level policy events like the White House Crypto Summit.","strength":"Sees and designs long-term system-level solutions, has credibility with both builders and policymakers, strong network in industry and government, and an ability to translate complex infrastructure needs into strategic narratives.","weakness":"Big-picture focus can come across as aloof or detached from grassroots community concerns; visible alignment with political figures risks polarizing parts of his audience; sometimes relies on sweeping futurism instead of tactical, bite-sized engagement.","recommendation":"On X, double down on short, high-value thread series (e.g., 'Onchain 101' and 'Policy Minutes') that break big ideas into digestible steps; host regular Spaces with engineers + regulators after major events; pin a founder thread that explains Chainlink’s concrete wins; use short explainer videos and visuals to increase shareability; engage replies strategically (answer questions, not noise) and collaborate with other crypto leaders to amplify reach while avoiding partisan framing that can fragment your audience.","roast":"You’re trying to put the entire financial system onchain while following 48 people — impressive vetting skills, Sergey. It’s like ordering world domination but asking for the guest list first.","win":"Co-founding Chainlink and elevating it into the de facto industry standard for verifiable on-chain data — plus visibly helping bring crypto conversations into rooms like the White House Crypto Summit."},"created":1774577781410,"type":"the visionary","id":"sergeynazarov"},{"user":{"id":"244647486","name":"Michael Saylor","description":"Bitcoin is https://t.co/KbbYe745r3 | $BTC Hodler | @Strategy Founder & Chairman | bio https://t.co/9Zlq0oHqyh | free education https://t.co/4L1s0iwzQ6 | $MSTR $STRC","followers_count":4961651,"friends_count":799,"statuses_count":7317,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1485632175932383235/8t0DGo6V_normal.jpg","screen_name":"saylor","location":"Miami Beach, FL","entities":{"description":{"urls":[{"display_url":"Hope.com","expanded_url":"http://Hope.com","indices":[11,34],"url":"https://t.co/KbbYe745r3"},{"display_url":"michael.com","expanded_url":"http://michael.com","indices":[86,109],"url":"https://t.co/9Zlq0oHqyh"},{"display_url":"saylor.org","expanded_url":"http://saylor.org","indices":[127,150],"url":"https://t.co/4L1s0iwzQ6"}]},"url":{"urls":[{"display_url":"strategy.com","expanded_url":"https://strategy.com","indices":[0,23],"url":"https://t.co/jJRaLehNkH"}]}}},"details":{"type":"The Visionary","description":"A relentless Bitcoin evangelist and founder-chairman who turns corporate strategy into a crypto crusade. Michael blends big-money moves, poetic proclamations, and educational outreach to bend attention and capital toward BTC.","purpose":"To accelerate global adoption of Bitcoin by educating institutions and retail alike, concentrating treasury capital into BTC, and reframing money and corporate strategy around a single decentralized standard.","beliefs":"Absolute Bitcoin maximalism: sound money, skepticism of fiat and inflationary policies, long-term conviction over short-term trading, and the credo that clear education plus decisive corporate action can change financial orthodoxy.","facts":"Follower count ~4,961,651; Following 799; ~7,317 tweets. Runs @Strategy, links to free Bitcoin education, and proudly tweets that entities he controls have acquired 111,000 BTC and 'not sold a single satoshi.' Famous for poetic lines like calling Bitcoin a 'swarm of cyber hornets' — yes, he really said that.","strength":"Unshakable conviction and clarity of message, institutional credibility as a public-company CEO, ability to move markets and attract massive attention, and a huge built-in audience for distribution and education.","weakness":"Tunnel-vision maximalism can be polarizing and alienate skeptics, messaging sometimes drifts into lofty metaphors that confuse newcomers, and heavy public concentration of BTC creates single-point risk that critics love to debate.","roast":"If conviction were calories he'd be a six-course meal — Michael will HODL you into next week and tweet a 12-step manifesto on why your savings are atheists without BTC.","win":"Turned MicroStrategy into a high-profile corporate Bitcoin treasury — publicly announcing the acquisition of 111,000 BTC and refusing to sell, making his firm a poster child for corporate crypto allocation.","recommendation":"Keep delivering the high-level vision but add more bite-sized, repeatable hooks: thread series that break down one Bitcoin concept per week, short explainer videos and charts for nontechnical audiences, regular X Spaces AMAs to humanize the message, and meme-friendly posts to widen reach. Pin clear educational threads, collaborate with other thought leaders and devs for cross-pollination, and use data-driven updates (timelines, treasury dashboards) to retain institutional trust while onboarding curious newcomers."},"created":1774577744345,"type":"the visionary","id":"saylor"},{"user":{"id":"394480074","name":"Robert Leshner","description":"CEO @superstateinc, Investor @robotventures, prev founded Compound; ardent capitalist; tweets are typically satire","followers_count":249672,"friends_count":1572,"statuses_count":8328,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1852061812578996224/LVXRgVJs_normal.jpg","screen_name":"rleshner","location":"New York","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"superstate.co","expanded_url":"https://superstate.co/","indices":[0,23],"url":"https://t.co/DtXdWAjlcK"}]}}},"details":{"type":"The Visionary","description":"A DeFi pioneer and serial builder who turns big ideas about transparent, autonomous finance into working products and loud, witty takes. Robert blends startup chops (founder of Compound) with investor instincts and a satirical social voice that keeps followers entertained and provoked. He’s as comfortable launching protocols as he is roasting regulators from the stage of X.","purpose":"To redesign financial infrastructure so capital flows with less opacity and more autonomy — empowering users to trust code over gatekeepers and accelerating the tokenization of real-world assets.","beliefs":"Believes in free markets, radical transparency, and technology-first solutions to systemic trust problems; skeptical of centralized gatekeepers, hostile regulatory overreach, and legal cultures that stifle innovation; optimistic that crypto and AI can meaningfully improve people's lives when deployed responsibly.","facts":"Fun fact: his tweets are typically satirical, he founded Compound, now runs Superstate and invests at Robot Ventures, and he reaches roughly 249,672 followers across 8,328 tweets — which means his jokes hit lots of inboxes.","strength":"Credibility born from real product success, clear subject-matter expertise in DeFi, a sharp, memorable voice, and a strong network of founders and investors that amplifies reach and deal flow.","weakness":"Satire and snappy takes can be polarizing or misread, sometimes alienating regulators, incumbents, or cautious users; strong opinions occasionally invite heated replies that distract from substantive messaging.","recommendation":"Double down on high-value threads that unpack a single idea (protocol mechanics, token economics, or regulation) followed by a punchy satirical TL;DR to keep tone. Host regular X Spaces with founders, regulators, and skeptics to humanize debates and capture clips for short-form video. Pin evergreen explainers, use polls to prompt interaction, collaborate with other crypto influencers for cross-pollination, and occasionally run subscriber-only deep dives or AMAs to monetize authority while preserving open, viral content.","roast":"He tweets like a DeFi Socratic seminar run by a stand-up comic — convinced that opaque banks are the problem while quietly whispering to his own smart contract that ‘autonomy’ also means ‘please validate my edge-case.’","win":"Founded Compound — a landmark DeFi protocol that helped define decentralized lending and token economics, turning an experimental idea into mainstream industry infrastructure."},"created":1774577635809,"type":"the visionary","id":"rleshner"},{"user":{"id":"941748610244530176","name":"RJ Scaringe","description":"Founder & CEO of @Rivian. Working to keep the world adventurous forever.","followers_count":118042,"friends_count":41,"statuses_count":530,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1983991340112474112/K1SvDP2x_normal.jpg","screen_name":"RJScaringe","location":"","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"rivian.com","expanded_url":"http://rivian.com","indices":[0,23],"url":"https://t.co/IMb2jipteL"}]}}},"details":{"type":"The Visionary","description":"Founder & CEO of Rivian on a mission to ‘keep the world adventurous forever’ by building bold electric vehicles and scalable autonomy. RJ blends big-picture ambition with headline-making partnerships and product reveals, all delivered with a touch of founder-level charm. He tweets major milestones and occasional human moments that rally a passionate community.","purpose":"To redefine transportation so people can explore with less friction and more sustainability—building the hardware, software, and partnerships that make adventure accessible at scale and steering the auto industry toward a cleaner, adventurous future.","beliefs":"Believes in mission-driven engineering, collaborative scaling through bold partnerships, safety-first autonomy, community-powered demand, and that great products create movements—not just customers. Values transparency on progress, relentless iteration, and designing for real-world adventure.","facts":"Fun facts: announced Rivian’s 100,000th vehicle production; collected 68,000 R2 reservations in under 24 hours; inked a JV with Volkswagen and a strategic deal with Uber (up to $1.25B + 50,000 robotaxis); has ~118K followers while following only 41 people and has tweeted ~530 times.","strength":"Visionary product and platform thinking, strong partnership-building (VW, Uber), an ability to create viral product moments and reservations, compelling mission-driven messaging, and credibility on both hardware and software fronts.","weakness":"Big ambitions invite intense scrutiny—timing and execution gaps can frustrate followers; founder-forward messaging can feel corporate at times; low social engagement habits (follows few, relatively infrequent conversational replies) miss opportunities to deepen community bonds.","roast":"RJ treats every product launch like a summit meeting of the future—thrilling to watch, mildly terrifying if you were counting on a delivery date. Also follows only 41 people, which is either supreme focus or the world’s chicest blocklist.","win":"Turning tens of thousands of reservations into momentum and locking strategic global scale through partnerships with Volkswagen and Uber—transforming Rivian from startup wonder to a platform player with real-world deployment plans.","recommendation":"Lean into storytelling: post short behind-the-scenes videos and technical threads that translate complex autonomy wins into everyday impact; amplify customer/adventure content to humanize the brand; host regular X Spaces or AMAs after big announcements; reply more to high-value fans and critics to build trust; pin milestone threads (reservations, production, safety metrics) and use partner co-posts to tap broader audiences. Consistent, candid updates + visual adventure content will convert casual viewers into loyal community members."},"created":1774577620269,"type":"the visionary","id":"rjscaringe"},{"user":{"id":"10078","name":"Reid Hoffman","description":"Co-Founder, LinkedIn. Investor. MSFT Board Member. Building an LLM to discover cures for cancer: @manas_co. Most importantly: Proud American.","followers_count":801565,"friends_count":691,"statuses_count":6609,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1987866955278106624/F_KCQWKI_normal.jpg","screen_name":"reidhoffman","location":"🇺🇸","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"beacons.ai/reidhoffman","expanded_url":"https://beacons.ai/reidhoffman","indices":[0,23],"url":"https://t.co/Tz4hLjpLiz"}]}}},"details":{"type":"The Visionary","description":"Co-founder of LinkedIn turned investor and builder, Reid Hoffman leverages an enormous network and strategic mind to tackle big problems—from social networks to curing disease. He’s outspoken on tech and politics and now building an LLM to help discover cures for cancer (@manas_co). Proud American who mixes moral clarity with Silicon Valley scale.","purpose":"To accelerate human flourishing by connecting people, capital, and technology—using platform-scale solutions and deep networks to solve society’s hardest problems (health, justice, and the architecture of opportunity).","beliefs":"Believes in the power of networks, entrepreneurship, and evidence-driven technology to create outsized social impact; values transparency, accountability, and civic responsibility; trusts that ambitious technical projects (like LLMs for medicine) should be harnessed for public good.","facts":"Fun fact: He’s actively building an LLM to discover cures for cancer with @manas_co — and he proudly labels himself a 'Proud American' in his bio.","strength":"Massive network and credibility, exceptional pattern-recognition for where technology and markets intersect, investor instincts, Board-level experience, and the ability to amplify ideas to millions.","weakness":"Can be polarizing and blunt on public platforms, occasionally mixes moral critique with insider maneuvering (which invites heated debate), and risks being spread thin across many high-stakes projects.","roast":"Reid will politely explain the ethics of your startup, introduce you to the investor who’ll fund it, and then quietly register the domain for your exit—because why settle for changing the world when you can monetize the moral high ground too?","win":"Co-founded LinkedIn and helped scale it into a platform-defining company (culminating in a major Microsoft acquisition), then parlayed that credibility into an influential investing and board career—now applying that momentum to accelerating cures for cancer.","recommendation":"On X, double down on serialized storytelling: publish concise multi-tweet threads that break complex LLM/cancer work into human stories and milestones, pin a clear explainer on @manas_co progress, host regular Spaces with scientists and founders, post short video updates from lab/boardroom, engage thoughtfully in replies to convert debate into dialogue, and use your network for curated amplifications (guest threads, co-hosted AMAs) to broaden reach without sacrificing credibility."},"created":1774577552069,"type":"the visionary","id":"reidhoffman"},{"user":{"id":"13479","name":"Matt Mullenweg","description":"I can think. I can wait. I can fast.","followers_count":169275,"friends_count":4031,"statuses_count":22556,"profile_image_url_https":"https://pbs.twimg.com/profile_images/1998201848008679424/OGHs2IoF_normal.png","screen_name":"photomatt","location":"The Future","entities":{"description":{"urls":[]},"url":{"urls":[{"display_url":"ma.tt/about","expanded_url":"https://ma.tt/about","indices":[0,23],"url":"https://t.co/Rza2AAxUBV"}]}}},"details":{"type":"The Visionary","description":"A calm, long-game builder of the open web who blends product craft with principled advocacy. Patient and strategic — he launches platforms, defends user freedom, and still finds time to recruit engineers with a single tweet. His feed mixes product wins, developer calls-to-action, and witty takes on internet culture.","purpose":"To democratize publishing and keep the web open and interoperable — building tools and communities so anyone can own their voice and data rather than be trapped in walled gardens.","beliefs":"Open source, decentralization, and long-term thinking are non-negotiable; communities and interoperable platforms beat closed ecosystems; patience, clarity, and engineering craftsmanship create durable products that empower others.","facts":"Fun fact: his pithy bio — \"I can think. I can wait. I can fast.\" — is basically a three-step product strategy. He has ~169k followers, ~22.5k tweets, and his tweets about the open web and WordPress regularly earn thousands of likes and hundreds of retweets (one plea for a Silicon Valley revival scored ~301k views).","strength":"Big-picture vision paired with technical credibility and community leadership; excellent at turning ideals into widely used products; high influence and the ability to rally engineers and users alike.","weakness":"Can come across as idealistic or blunt in public debates; deep principles sometimes clash with pragmatic business realities, and the devotion to long-term bets can slow rapid, opportunistic moves.","roast":"You built a platform that powers millions of sites and literally argues for the open web, yet you still beg Netflix for a Silicon Valley reboot — clearly the only thing you haven't disrupted is peak TV nostalgia.","win":"Creating WordPress and leading it into a platform that enabled millions of people and businesses to publish and own their content — a foundational win for the open internet.","recommendation":"Turn big ideas into snackable threads and short video explainers that show wins and how-tos; pin an evergreen thread about the open web and recent victories; host regular AMAs/Spaces to recruit and energize devs; repurpose long posts into multi-tweet stories with clear CTAs to drive signups and contributions; and engage top repliers to amplify reach."},"created":1774577324353,"type":"the visionary","id":"photomatt"}],"activities":{"nreplies":[],"nbookmarks":[],"nretweets":[],"nlikes":[],"nviews":[]},"interactions":null}},"settings":{},"session":null,"routeProps":{"/creators/:username":{}}}